Tras ya más de un año sin ninguna actualización en LibreServo, pudiera parecer que el proyecto está parado y/o abandonado. Como he comentado más de una vez, y me reitero, nunca dejaré LibreServo hasta que no esté totalmente terminado, aunque me lleve 5 años más.
¿Qué ha pasado en este último año?
Aunque en la web no se ha actualizado nada, detrás de la web han ocurrido bastantes cosas. La principal y la que me ha quitado casi 8 meses fue que me contactó una empresa que hace viviendas en 3D, querían desarrollar la electrónica para un nuevo brazo de construcción y andaban un poco desesperados porque no encontraban a nadie que supiera programar lo que ellos requerían. Casualidades de la vida, el encóder que utilizaban era de la misma familia que el de LibreServo, así que Google hizo su magia y me encontraron.
Resumiendo mucho, un proyecto de en teoría 1-2 meses al final resultó ser de 7-8 😅 pero finalmente llegó a buen puerto (este mismo mes que escribo este artículo). De cara a LibreServo no ha sido un tiempo desperdiciado, porque varios conceptos han sido validados y demostrados en real que funcionan.
Por otro lado, antes del proyecto de la impresión de casas estuve haciendo cambios muy profundos en la programación de LibreServo. Con la versión actual que está en Github, LibreServo supera el 95% de utilización de la ROM, dicho en otras palabras, no hay casi margen de mejorar y/o posibilidad de introducir nuevas funciones. Con ello en mente me puse a reprogramar LibreServo... a día de hoy la utilización de ROM está por debajo del 75%, una mejora abrumadora. La mayor parte de la mejora viene de la reprogramación del tratamiento de la comunicación del puerto serie, la recepción de comandos y su procesado, sólo en ese apartado reduje en más de 2000 líneas el código. Además, aproveché para comentar todo el código, la verdad, un trabajo ímprobo para elevar el estándar de calidad a un nivel más aceptable. Me falta terminar de comentar el código y terminar de probar que el nuevo código funciona correctamente, es prácticamente como un nuevo LibreServo. Actualizaré Github en cuanto esté terminado y probado.
Por si no fuera poco, he empezado con algún nuevo proyecto usando el estándar de LibreServo, en concreto estoy haciendo un driver doble para motores, es como dos LibreServos pero unidos y pensado para manejar motores DC, en concreto lo quiero para un siguelíneas que querría volver a hacer. LibreDriver le llamo al proyecto (muy original el nombre, lo sé 😜). Además, el proyecto lo he realizado directamente en Kicad, por fin me empiezo a alejar de Eagle.
LibreDriver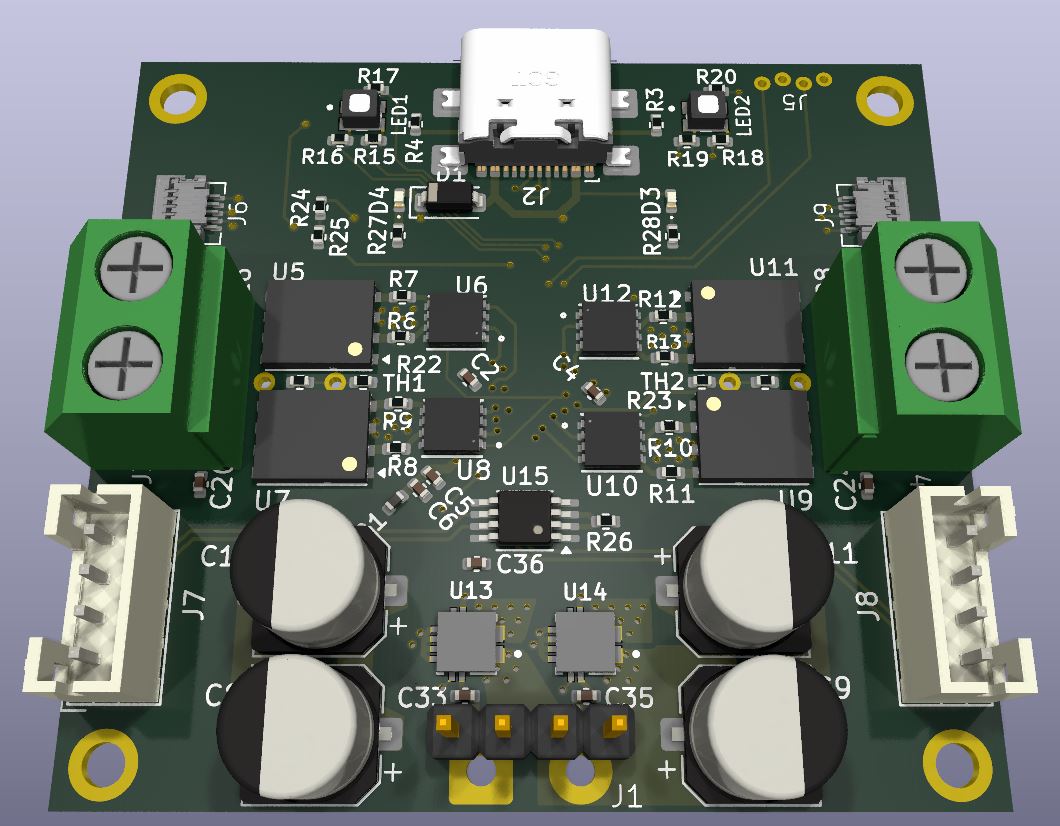
Por último, tengo que migrar la web a una versión de Drupal superior por ciertas incompatibilidades... así que tras más de 5 años usando una Raspberry 3 como servidor, me pasaré a un mini-pc N100, en la que la web será una máquina virtual, lo cual me facilitará muchísimo su gestión, backup y recuperación en caso de desastre.
Espero traer noticias más pronto que tarde, agosto no cuenta... 😇