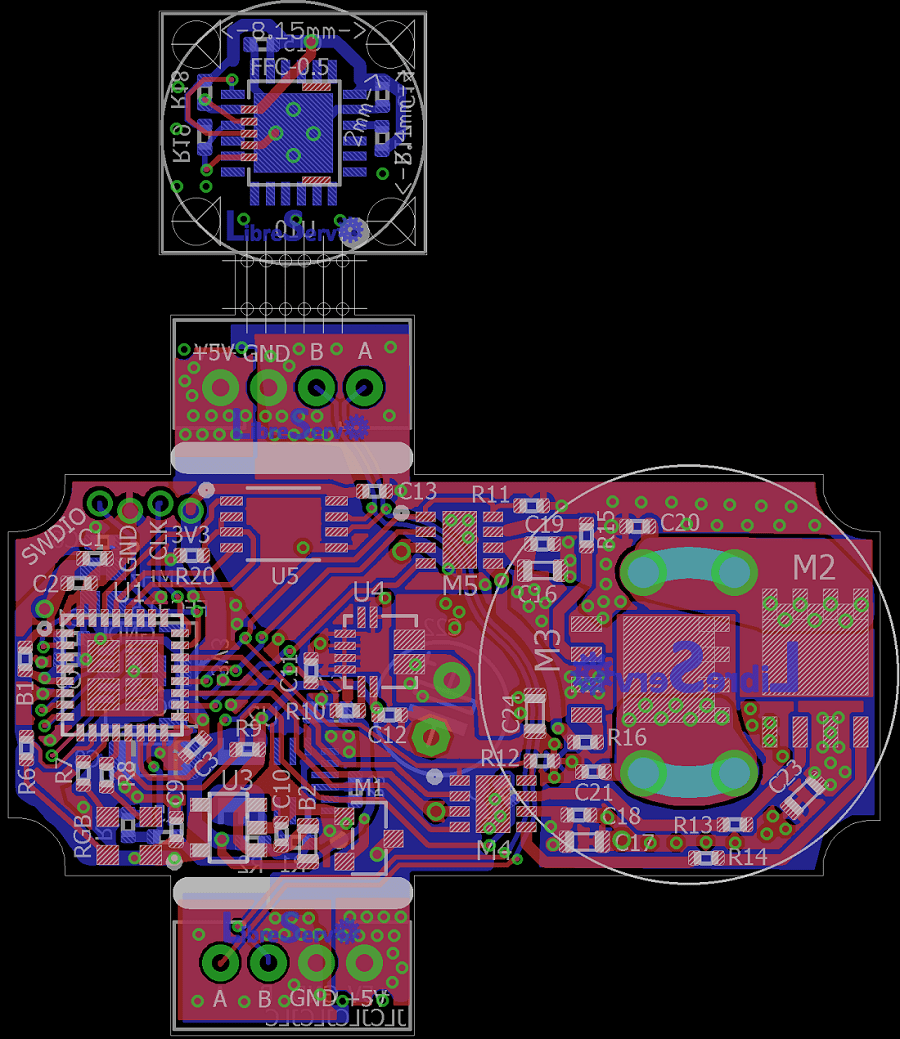
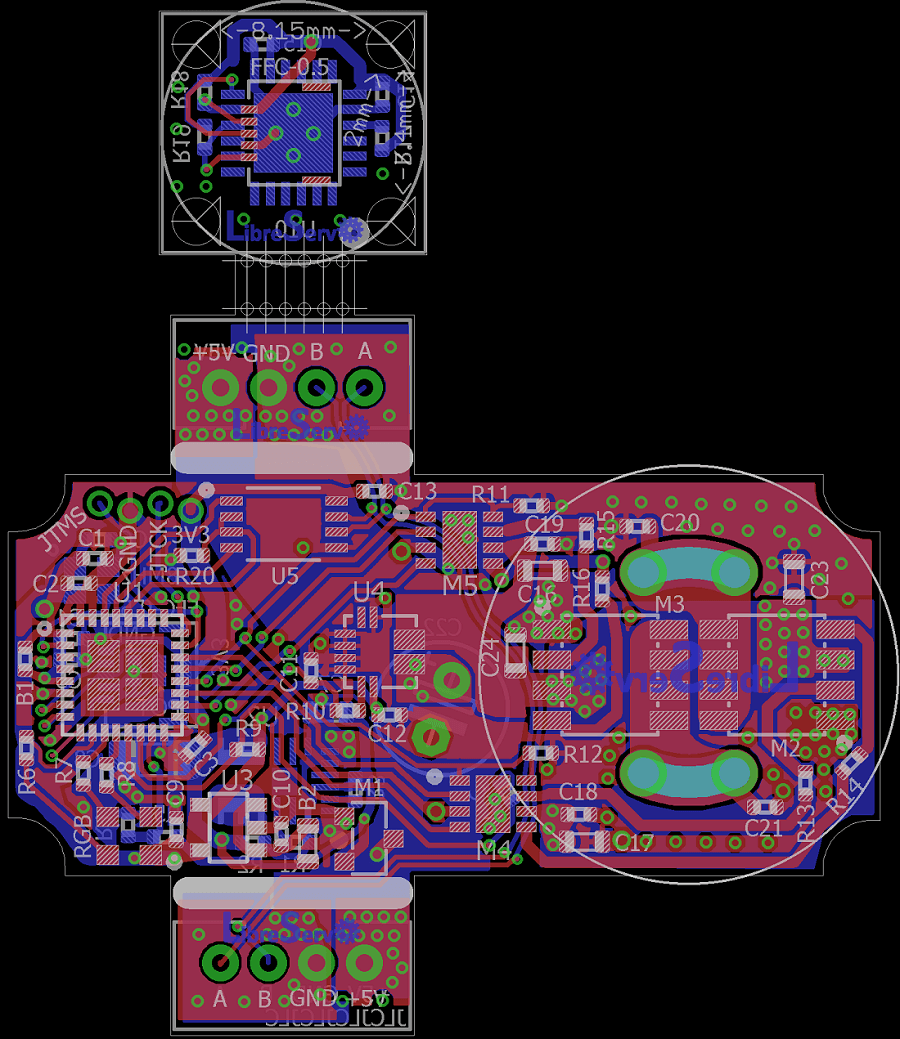
 PCB de LibreServo v2.1
PCB de LibreServo v2.1
Estos esquemas no van a durar mucho porque ya se han realizado nuevos cambios y se van a enviar a fabricar en los próximos días si todo va bien. El pedido de la siguiente versión coincidirá que son las vacaciones chinas, pero espero no tener ningún tipo de problema salvo algún pequeño retraso ya anunciado por el fabricante JLCPCB.
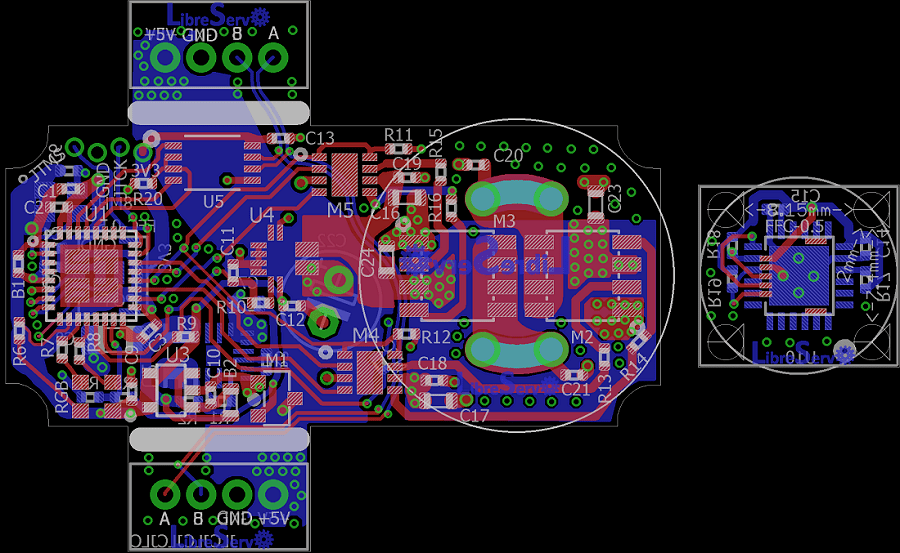
En esta versión LibreServo, la PCB principal, pasa de 4 a 6 capas debido a que JLCPCB, como comentamos en el artículo de cambios en LibreServo v2.1, ha realizado una oferta muy agresiva en la que sale más barato fabricar una PCB de 6 capas en vez de 4, teniendo en cuenta que en 6 capas te regalan el acabado ENIG (en oro) y las vías te las rellenan y tapan, ósea, un acabado totalmente profesional, es una auténtica locura de oferta.
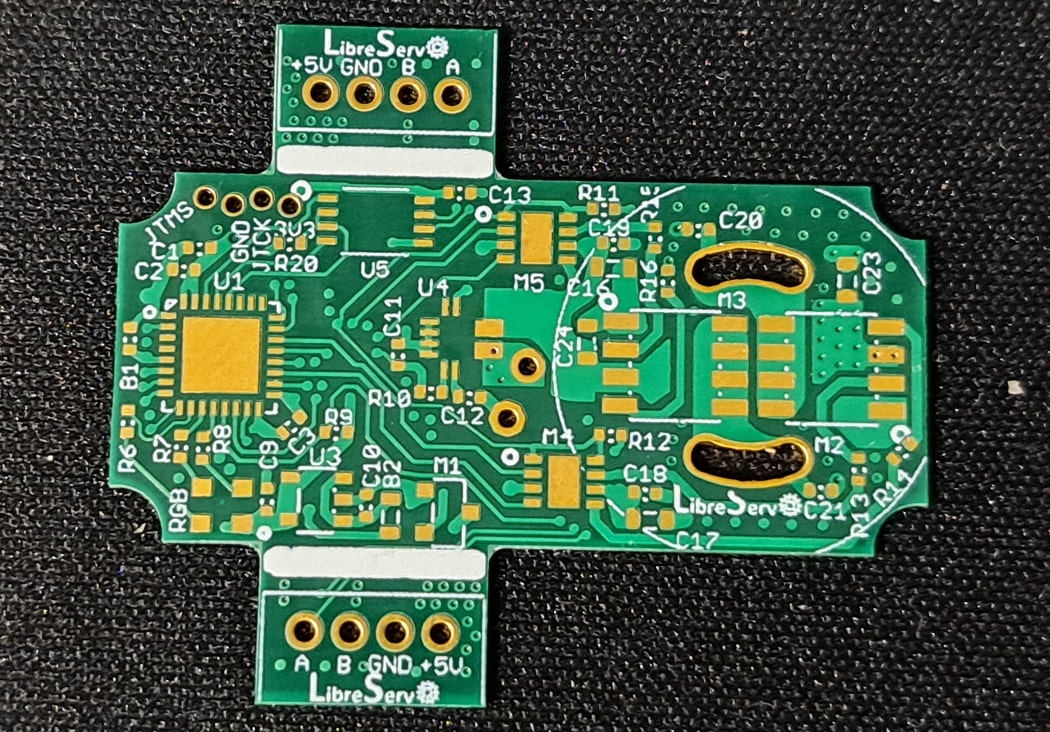
A pesar de todo ello, por supuesto LibreServo mantendrá total compatibilidad con 4 capas y tan sólo a la hora de generar los gerbers se quitan las capas centrales y asunto arreglado.
 Ficheros de producción
Ficheros de producción
 Versión Final LibreServo v2.3.1
Versión Final LibreServo v2.3.1

 Ficheros de producción
Ficheros de producción
 LibreServo v2.3 PCB
LibreServo v2.3 PCB

 LibreServo v2.2 PCB
LibreServo v2.2 PCB
 Nueva LibreServo v2.1
Nueva LibreServo v2.1