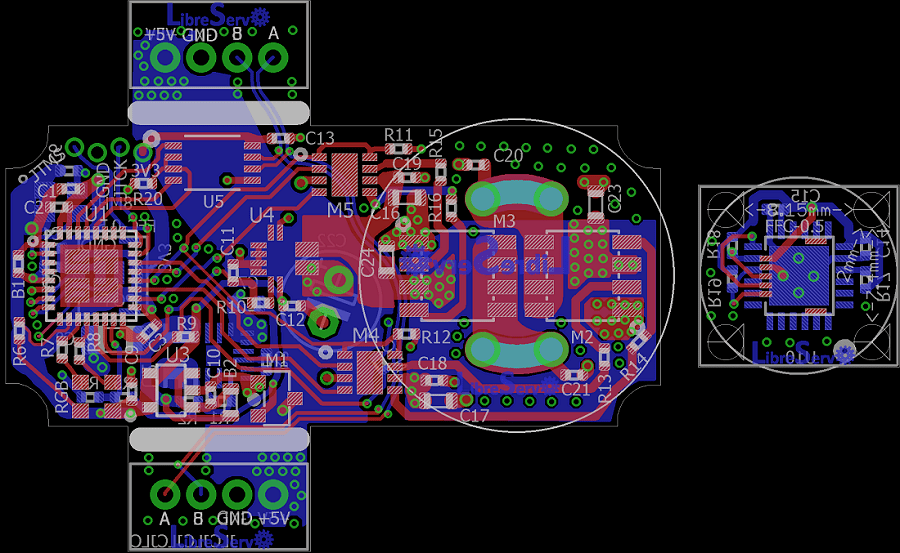
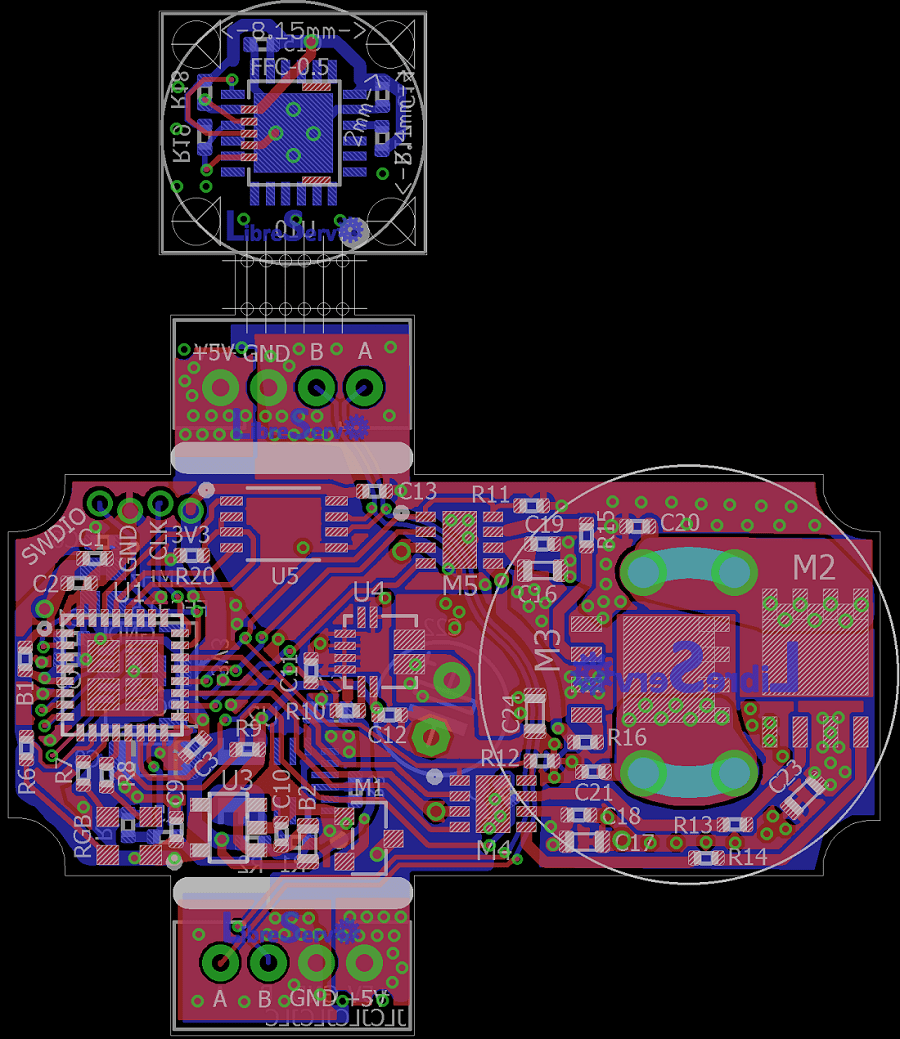
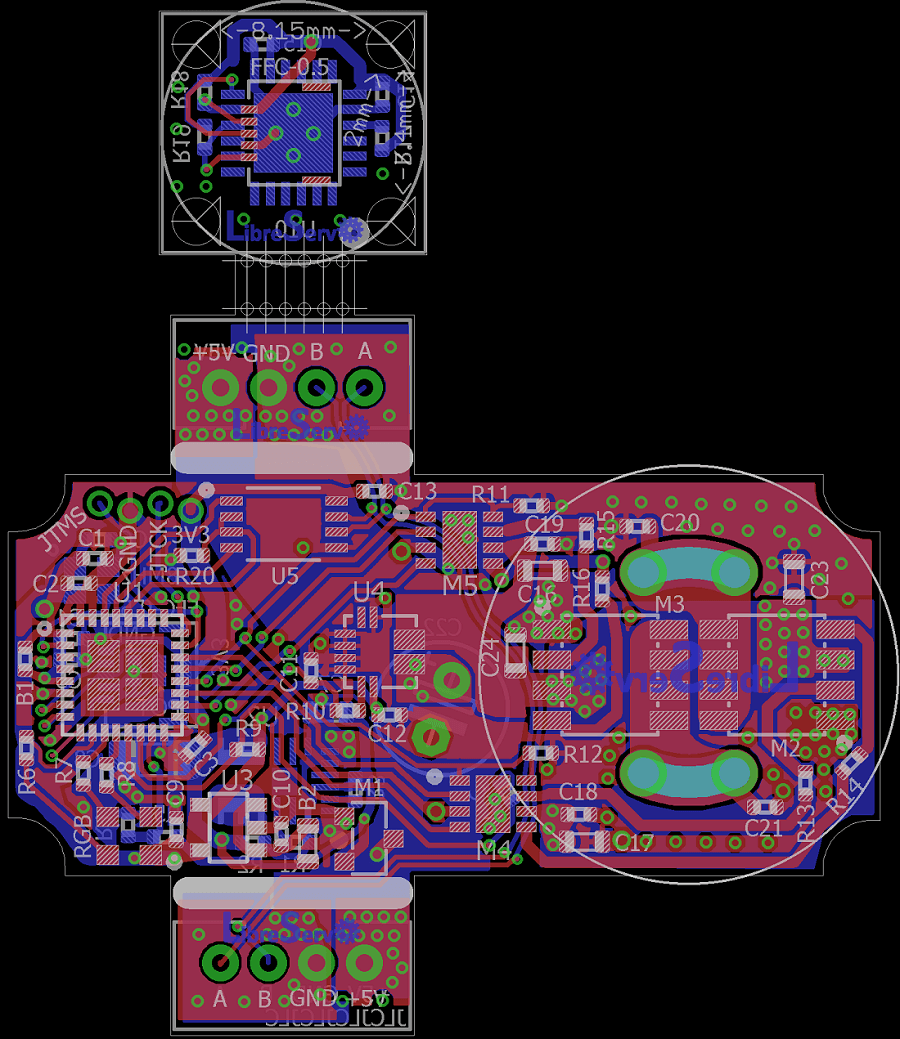
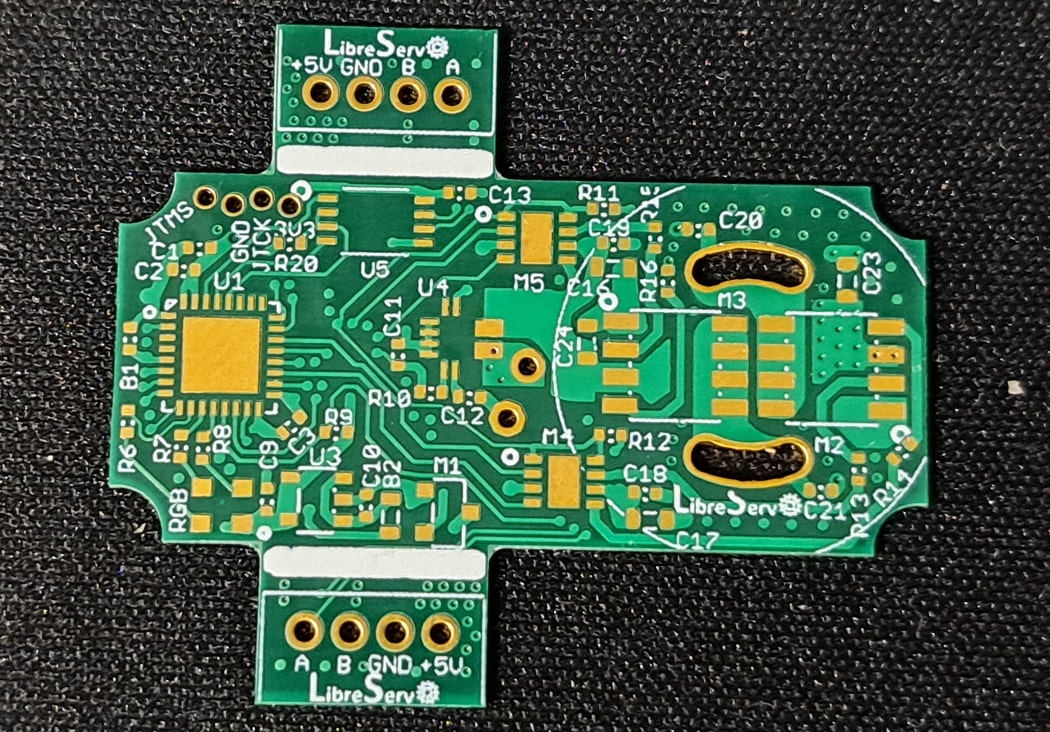
 LibreServo v2.1 PCB
LibreServo v2.1 PCB
These schematics will not last long because new changes have already been made and will be sent to manufacture in the coming days if all goes well. The order of the next version will coincide with the Chinese vacations, but I hope not to have any problem except some small delay already announced by the manufacturer JLCPCB.
In this LibreServo version, the main PCB, goes from 4 to 6 layers because JLCPCB, as we mentioned in the article of changes in LibreServo v2.1, has made a very aggressive offer in which it is cheaper to manufacture a 6-layer PCB instead of 4, taking into account that in 6 layers you get for free the ENIG finish (in gold) and the vias are filled and covered, in other words, a totally professional finish. It is a really crazy offer.
Despite all this, of course LibreServo will maintain full compatibility with 4 layers and only when generating the gerbers the central layers are removed and the matter is solved.
 Ficheros de producción
Ficheros de producción
 LibreServo v2.3.1. Release Version
LibreServo v2.3.1. Release Version

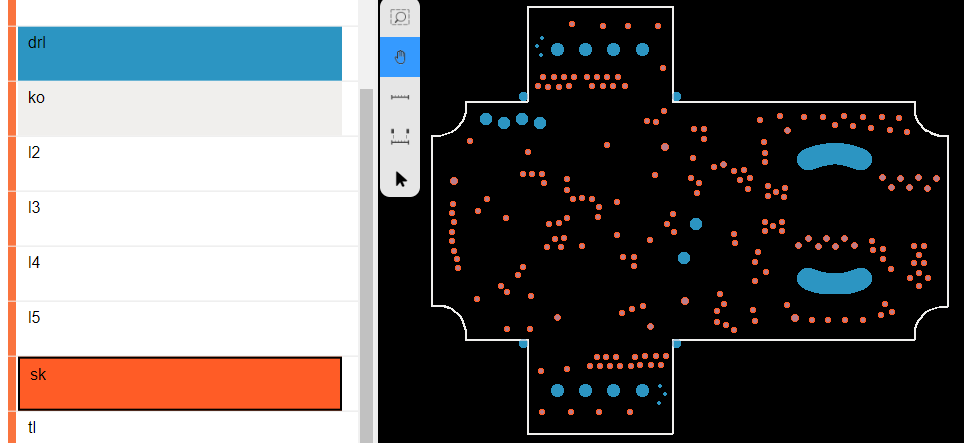 Production Files
Production Files
 LibreServo v2.3 PCB
LibreServo v2.3 PCB

 LibreServo v2.2 PCB
LibreServo v2.2 PCB
 New LibreServo v2.1
New LibreServo v2.1