As I already mentioned in A little history about me, with my first biped I encountered several obstacles, the price of the servomotors and their quality were the biggest determining factors. For my second biped (I already had a job), I decided to go overboard and not to look at the price of the servo motors. I wanted powerful ones, of good quality and that the passage of time and use didn't harm them. I ended up buying the Hitec 5990TG, servo motors with 30Kg/cm of force and titanium gears. I got them at a very good price, with an extraordinarily favorable euro-dollar exchange rate. Even so, the price of the biped had tripled and after its use I detected a new problem, they were powerful and of clearly superior quality to the ones I had before, but they were still "stupid". Finally and for different reasons (among others the exorbitant price of building a biped by hand), I stopped building bipeds and turned to the cars (line-followers, trackers...).
DY-BOT v2
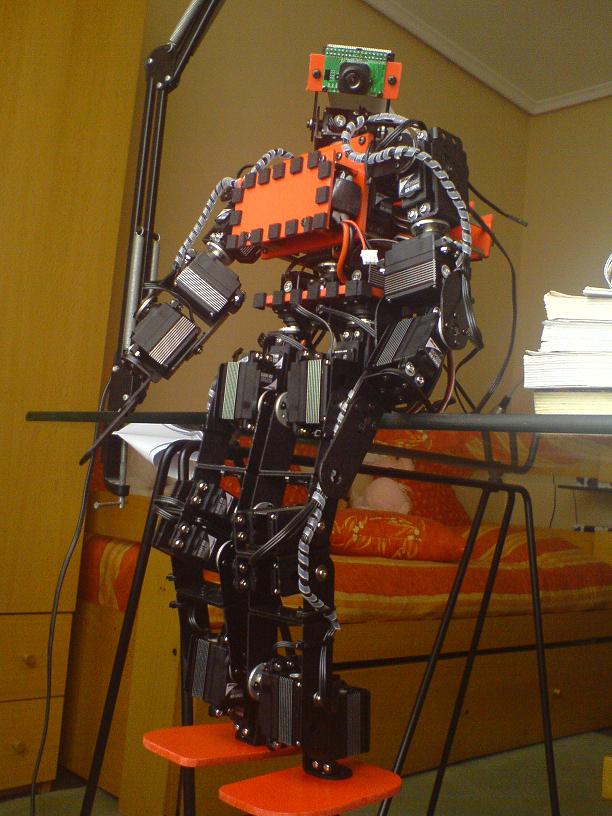
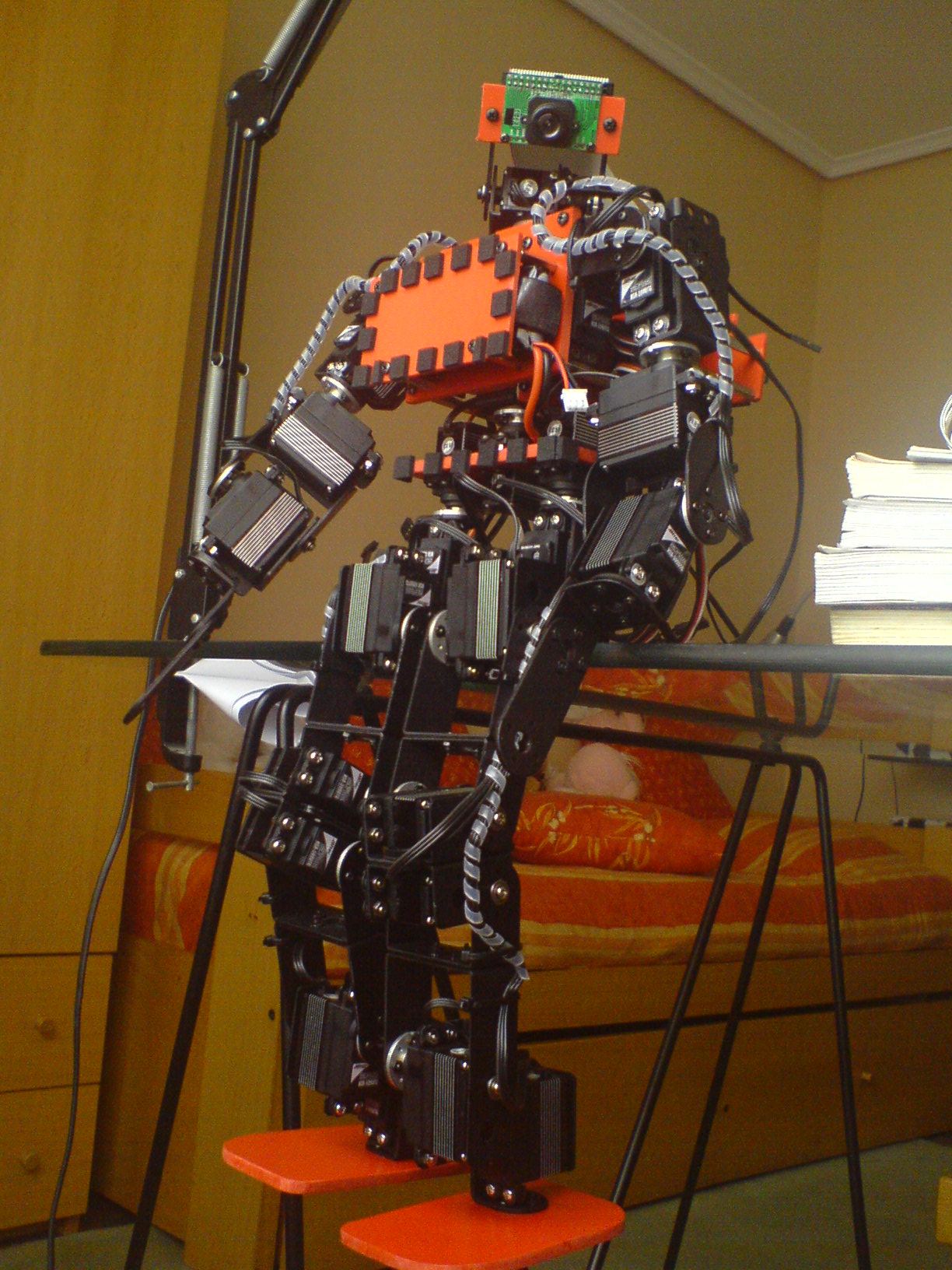
Almost 6 years have passed, I have remained linked to robotics all these years but I always had a thorn in my side, I never reached the full potential that mechanically the very expensive 5990TG had. Nowadays, 3D printers have also become popular so there are new opportunities to own new designs, cheap, light and easy to implement. With the idea of recovering those 5990TGs I came up with something better... Why not instead of dumb servos with excellent mechanics modify them to have clever servos with excellent mechanics? And, since we are going to design something new... why not make it in such a way that they would be compatible with future servos that I may buy? The truth is that China is no longer what it was only 7-8 years ago and now if you really know how to search, it is possible to find good quality hardware at a more than affordable price.
Said and done, I already have a new project in mind!
Hitec 5990TG
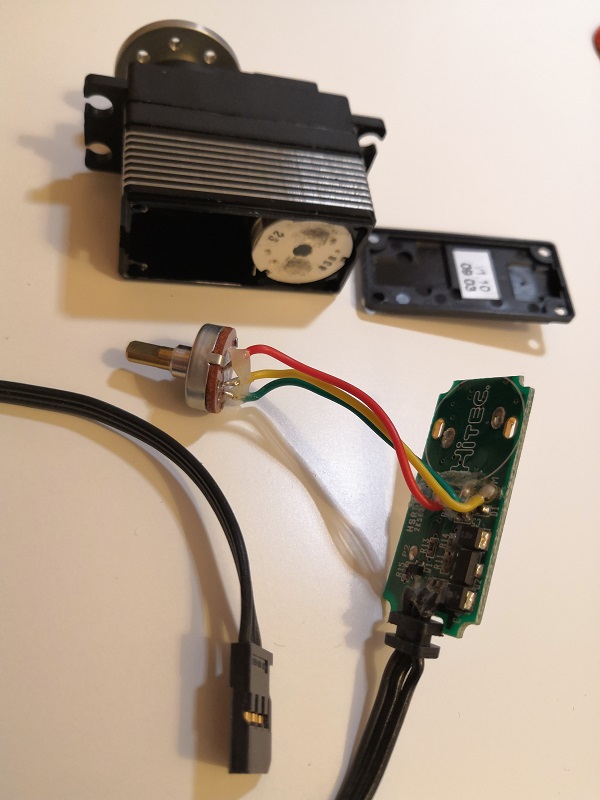
The idea is to design the electronics of the servomotor to turn a servo into a "smartServo". In addition, I will try to make it as standard as possible in size and shape, so that it can be adapted not only to my Hitec's but to powerful and cheap servos from China (for example) to obtain a servo (servo + electronics) for less than 45-50€ but with characteristics of a servo of 150-200€.
Characteristics:
It is intended to achieve superior characteristics than today's smartServos whenever possible:
- The servo motor will be able to rotate 360 degrees.
- The servomotors can be chained. It will not be necessary to connect all the servomotors to a main controller board.
- The resolution of the servomotor will be
at least 12 bits (4096 steps)16 bits (65536 steps). - The voltage range will go from just 4.5V to 18V.
- The communication of the servomotor may be PWM to maintain compatibility, but to obtain all the characteristics, it would be serial up to 9Mbps
full duplexRS-485 half-duplex (configurable at different speeds) trying at all times that no type of external hardware is needed (just an MAX485), being possible to control them directly from the pc (with aUSB-SerialUSB-RS485 adapter), with an arduino at 5V or with any controller at 3.3V. - The servomotor itself will be in charge of generating the movement curves (for example sinusoidal or powerful hermitic curves [given the initial and final point, as well as the slopes at these points, calculate the curve]).
- Ability to chain movement commands that the servo will save and follow in an orderly manner.
- Ability to read the voltage, current consumed (instantaneous, total and average), position and temperature of the servomotor.
- Ability to generate a log of position, voltage, current and/or temperature to be analyzed later.
- Ability to alter the control constants of the servomotor.
- Ability to send the same command to several servomotors at the same time, to all of them or to ranges of them without having to send the command several times, only once.
- Control of the motor torque by reading the current.
- RGB LED (we are in 2018, if something is not rgb it is no longer valid for anything 😉 ).
Let's do it!