Avances de LibreServo
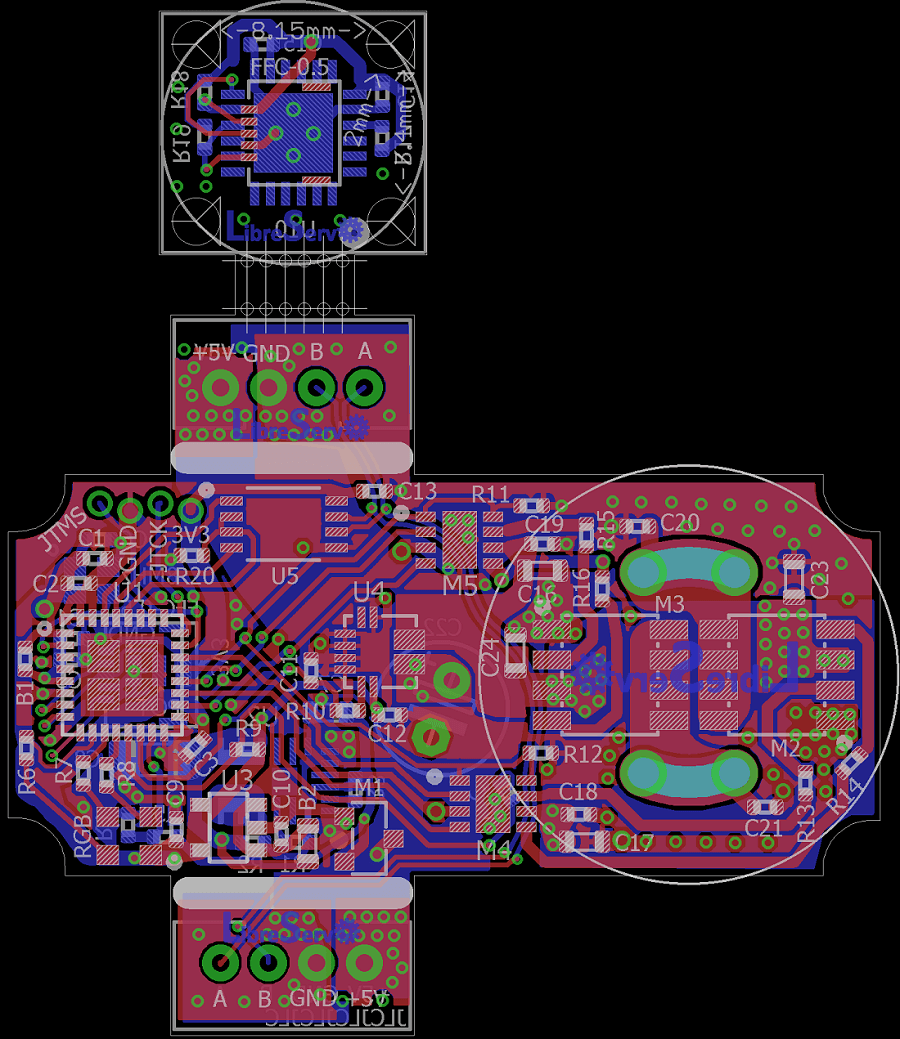
 Ficheros de producción
Ficheros de producción
Tras ya más de un año sin ninguna actualización en LibreServo, pudiera parecer que el proyecto está parado y/o abandonado. Como he comentado más de una vez, y me reitero, nunca dejaré LibreServo hasta que no esté totalmente terminado, aunque me lleve 5 años más.
¿Qué ha pasado en este último año?
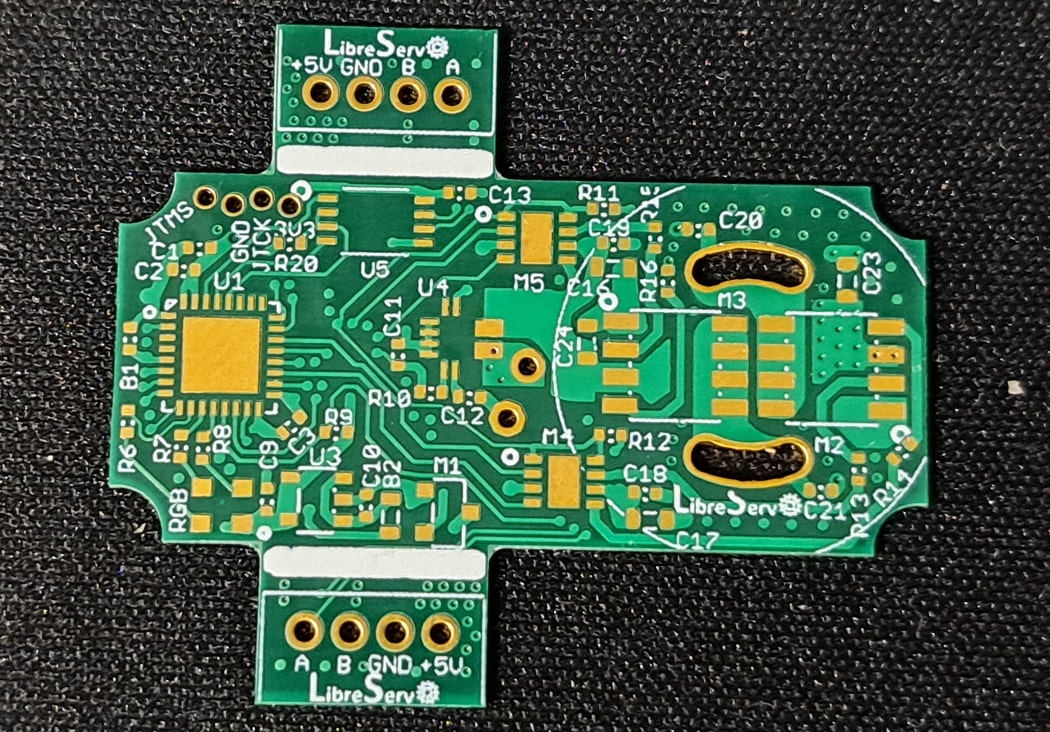
 Versión Final LibreServo v2.3.1
Versión Final LibreServo v2.3.1

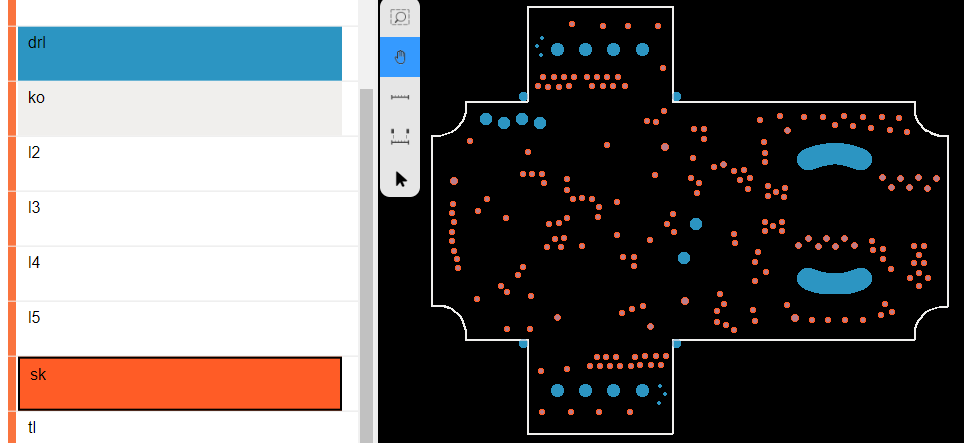 Ficheros de producción
Ficheros de producción
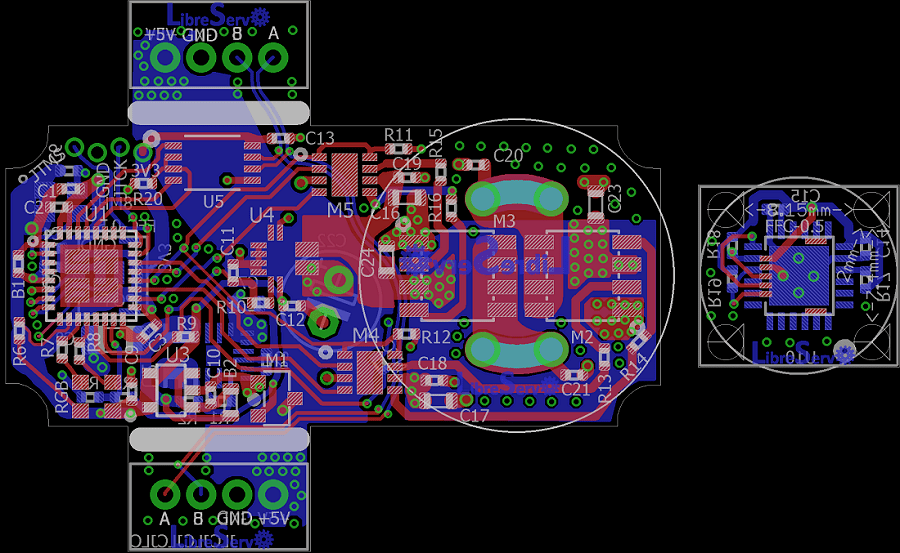
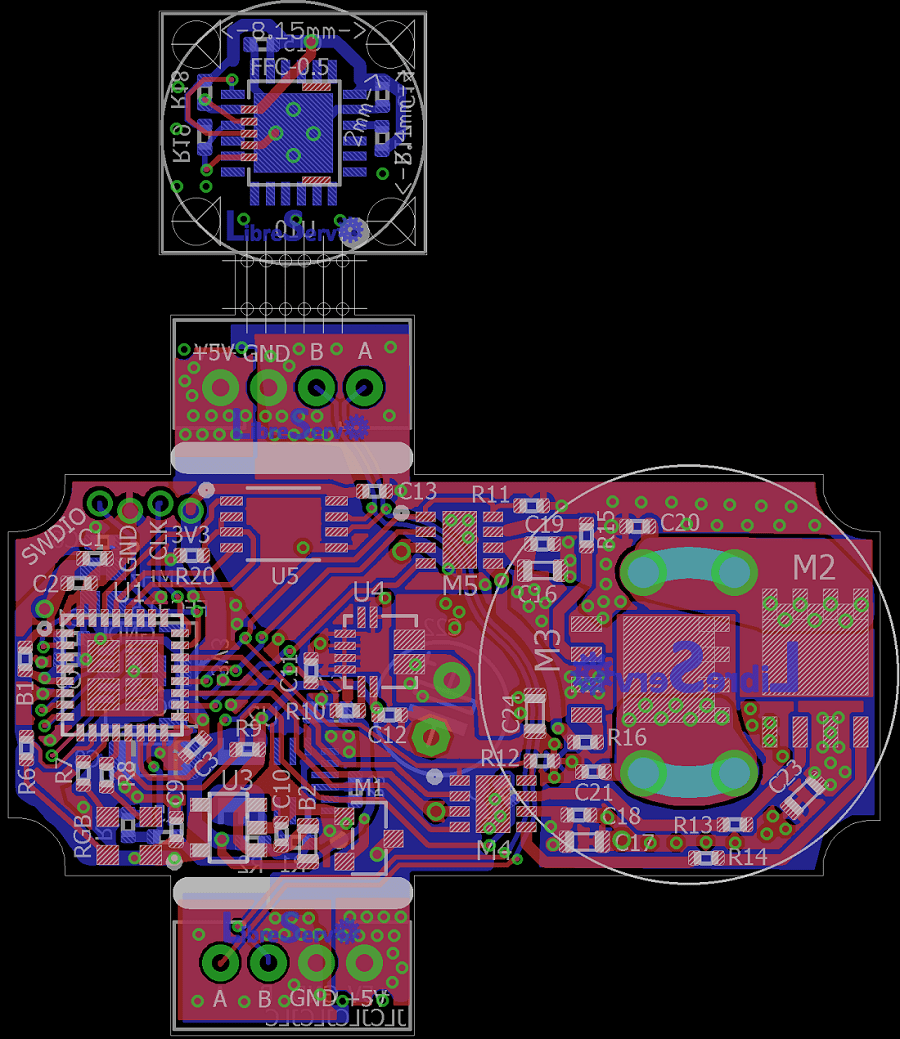 LibreServo v2.3 PCB
LibreServo v2.3 PCB

 LibreServo v2.2 PCB
LibreServo v2.2 PCB
 Nueva LibreServo v2.1
Nueva LibreServo v2.1
 PCB de LibreServo v2.1
PCB de LibreServo v2.1