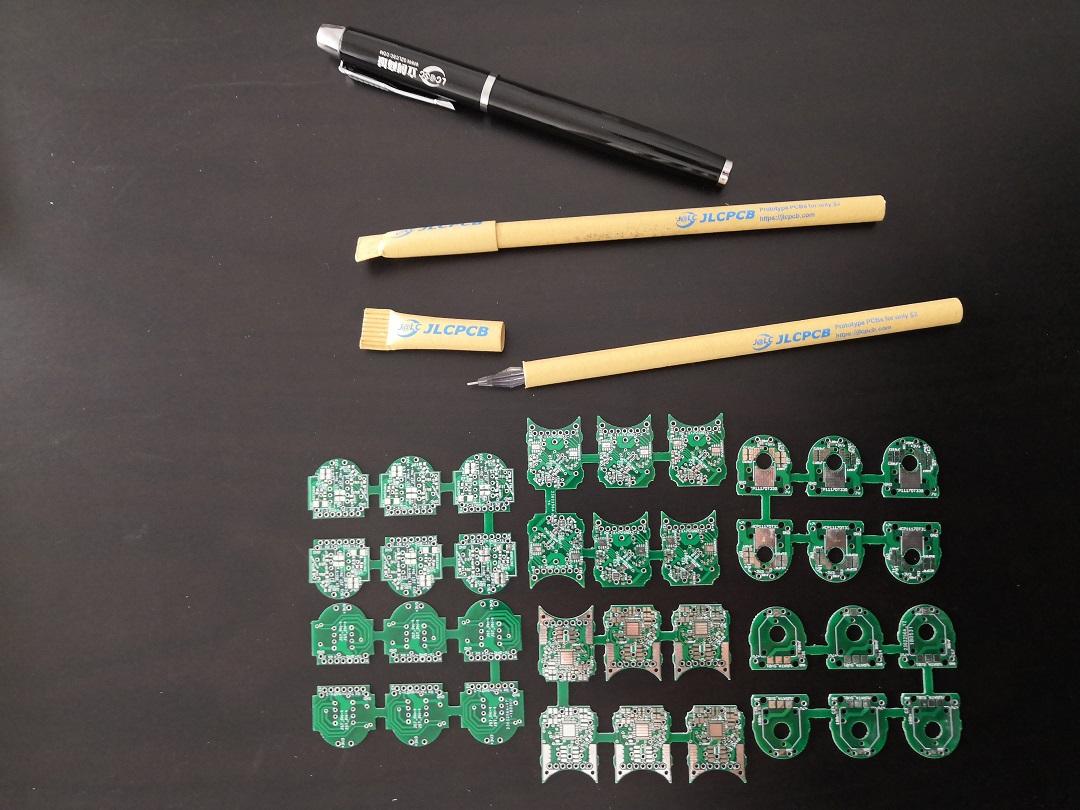
¡Ya han llegado las PCB
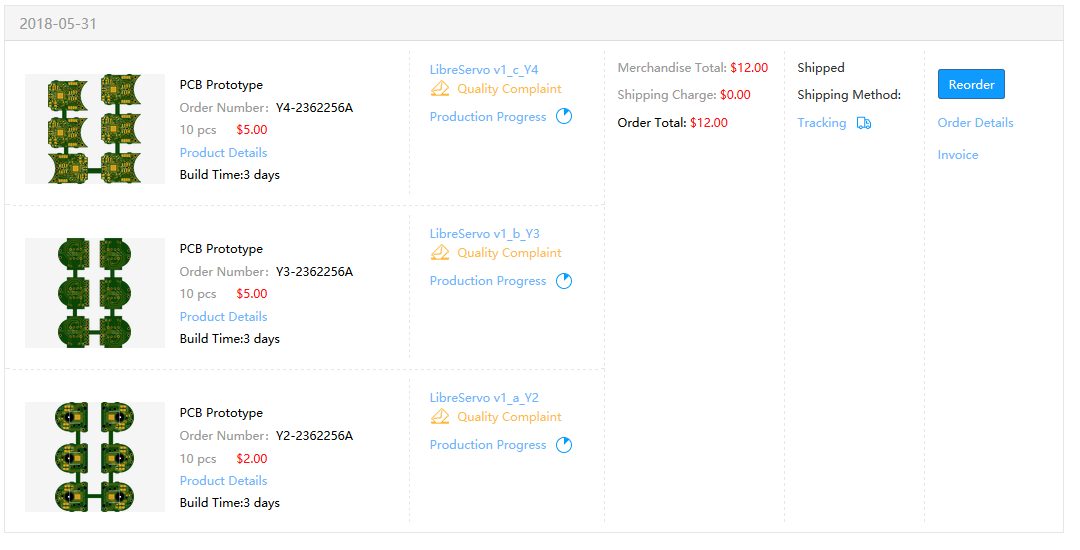
Tengo que decir que estoy ciertamente asombrado de manera muy positiva con JLCPCB. No me han cobrado absolutamente ningún extra por la fabricación (a pesar de que panelicé 6 circuitos en cada PCB), el transporte ha sido muy rápido y sin incidencia alguna en ambos pedidos y ¡hasta me han regalado bolígrafos! En tan sólo dos semanas las han fabricado y ya las tengo aquí en mi casa. ¡Muy buen trabajo!