Un servomotor es un motor que mantiene una posición dada, ¿pero cómo llega a dicha posición?
Un servomotor normal, sólo recibe la posición final por PWM y siempre va lo más rápido que puede a dicho punto. En cambio, un servomotor inteligente generalmente recibe un comando que le indica la posición final y en cuánto tiempo tiene que alcanzar dicha posición, es en ese momento cuando el servomotor inteligente empieza a calcular la ruta hasta la posición final. Existen varias formas de trazar la ruta, eso son las curvas de movimiento.
LINEAL
Es la más básica, se divide el espacio entre el tiempo que se tiene y se calcula una velocidad constante. El problema que tiene es que propone una aceleración inicial y final casi infinita. Esta patada de aceleración provoca gran desgaste mecánico en motor y engranajes y unas fuertes vibraciones por las aceleraciones.
En la siguiente foto se puede apreciar claramente, eje izquierdo corresponde a la posición y aceleración, mientras que el eje derecho es velocidad:
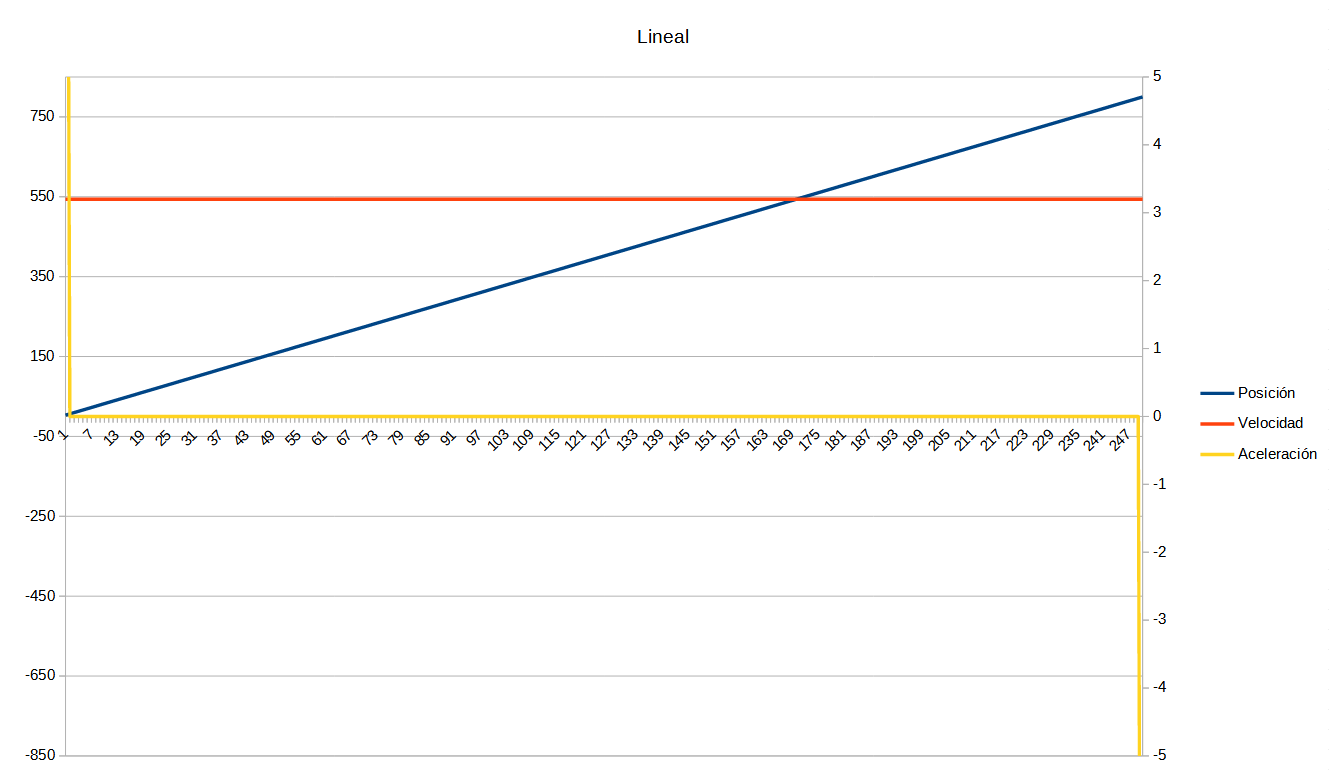 Gráfica de curva lineal. Posición, aceleración y velocidad
Gráfica de curva lineal. Posición, aceleración y velocidad
TRAPEZOIDAL
Para reducir la patada de aceleración se crea un perfil con una aceleración máxima constante. Esto genera una rampa de aceleración inicial, un tramo de velocidad constante y un tramo de desaceleración final. Este es la única curva de movimiento con la anterior que ofrecen los fabricantes. El problema que tiene es que sigue generando vibraciones por los cambios abruptos en la aceleración. Es más suave que el perfil anterior, pero sigue teniendo vibraciones.
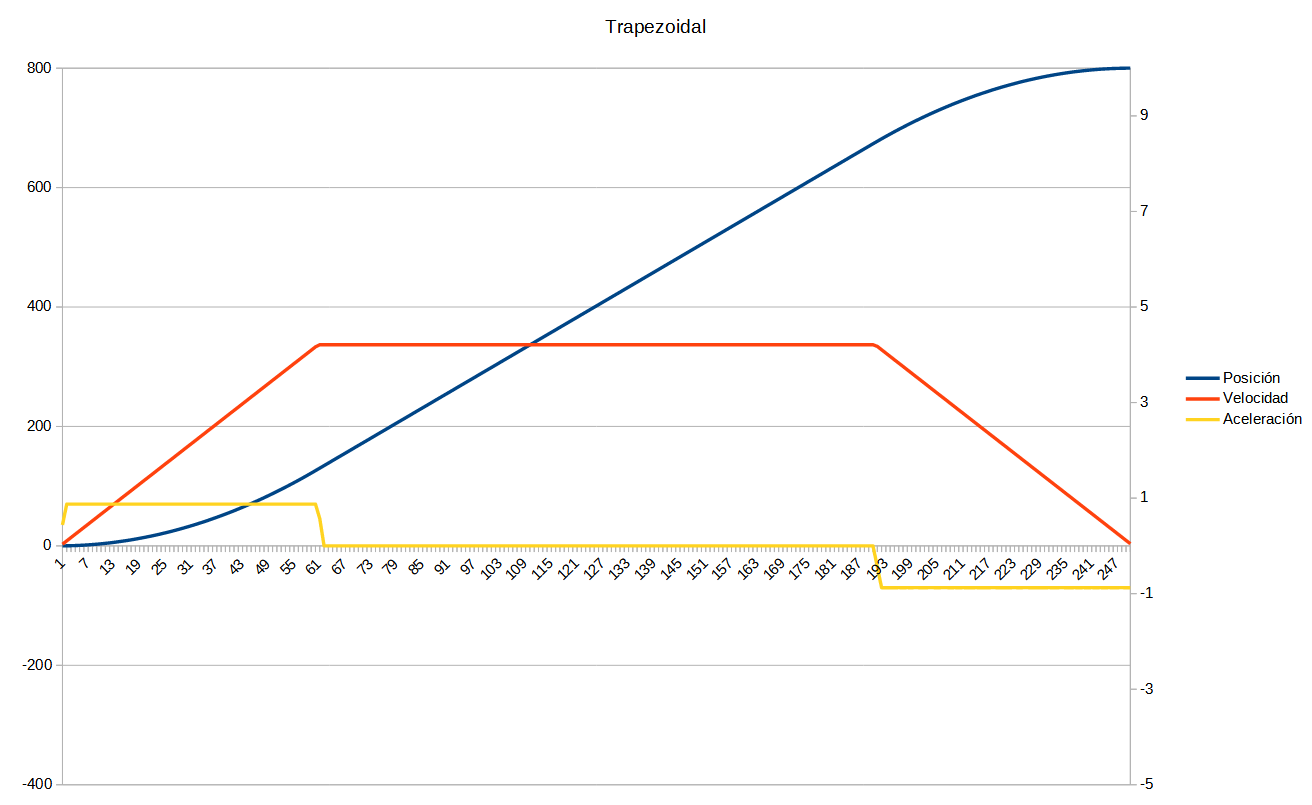 Gráfica de curva trapezoidal. Posición, aceleración y velocidad
Gráfica de curva trapezoidal. Posición, aceleración y velocidad
CURVA EN S
Esta curva de movimiento ya no se ofrece por los fabricantes, pero sí en LibreServo. Con esta curva de movimiento se pretende eliminar por completo cualquier patada de aceleración. Esta curva de movimiento es específica para hacer una transición en aceleración limpia y sin saltos como se ve en las gráficas.
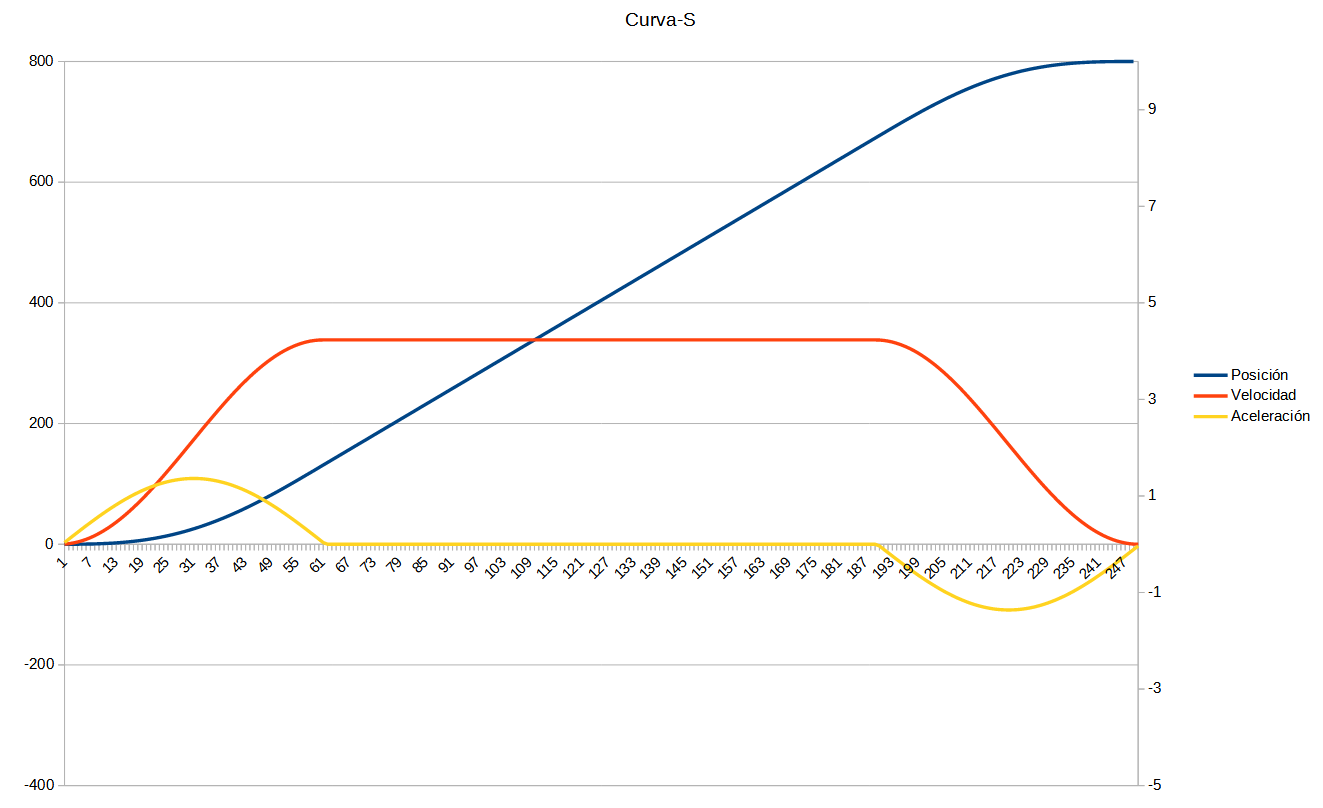 Gráfica de curva en S. Posición, aceleración y velocidad
Gráfica de curva en S. Posición, aceleración y velocidad
CURVA HERMÍTICA
Esta curva de movimiento de nuevo es única en LibreServo. Todas las demás curvas presuponen salir de parado y terminar en parado, ésta es la única curva que permite iniciar y terminar el movimiento partiendo o terminando en una velocidad dada. Esto es indispensable en situaciones en las que queramos terminar un movimiento o modificarlo en mitad de un recorrido, por ejemplo, si detectamos una posible caída, un posible error o algún peligro. Además, es perfecto para pasar por diferentes puntos marcados a diferentes velocidades, LibreServo se encargará de ejecutar la curva. Esta curva continúa un movimiento, pero no la aceleración que ya tuviera, así que puede generar vibraciones.
En la siguiente foto vemos dos caminos diferentes. En ambos se parte de 0, pasa por 100, por -50 y vuelve a cero, pero en el primer camino la velocidad en cada punto siempre se indica que será cero, mientras que en el segundo en los puntos intermedios la velocidad será de 4.
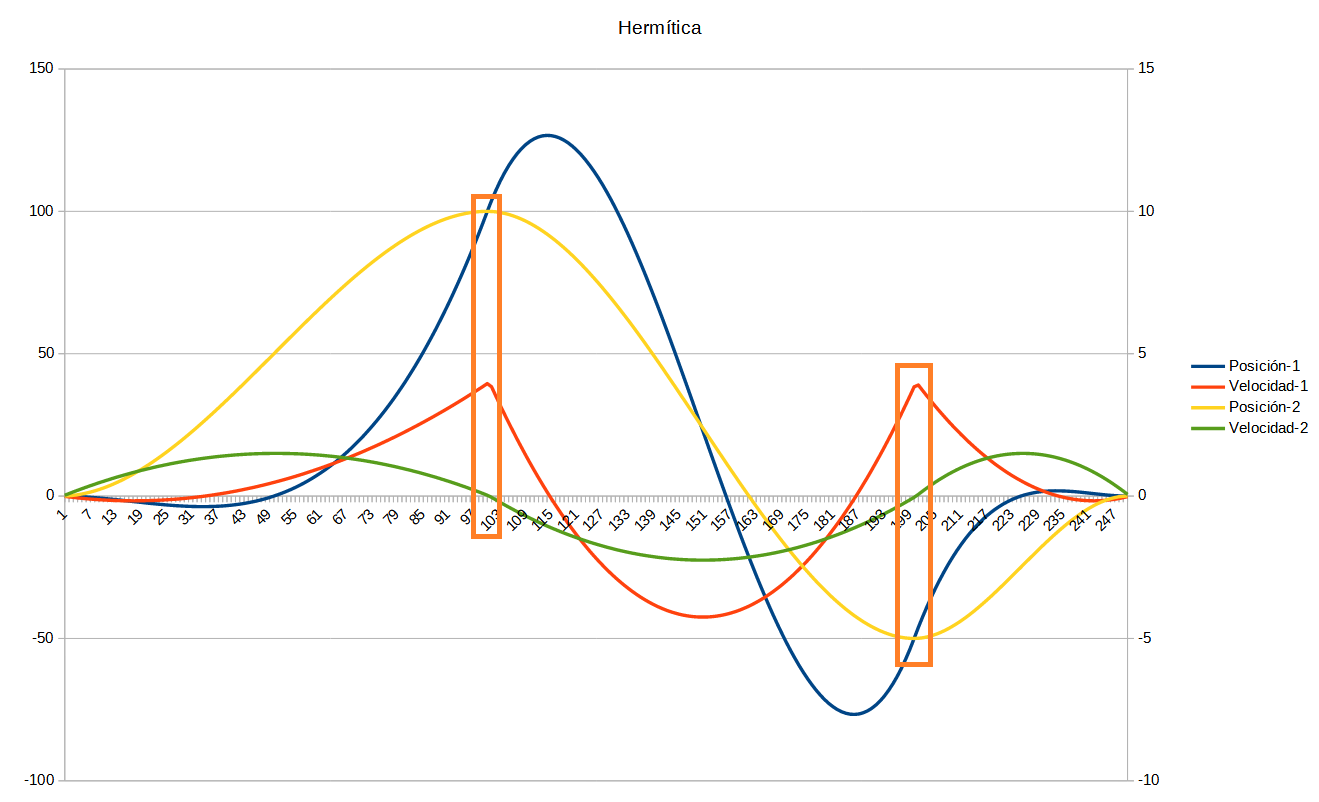 Gráfica de curva Hermítica. Comparativa de posición y velocidad
Gráfica de curva Hermítica. Comparativa de posición y velocidad