Para los que llevamos unos cuantos años en el mundo de la robótica, Lynxmotion es una marca americana muy conocida por todos.
Hace 10 años si querías formar una estructura con servomotores para dar vida a un brazo robótico, un hexápodo, un robot humanoide o cualquier estructura que implicase el uso de servomotores estándar, Lynxmotion era la vía a seguir por sus piezas de aluminio que permitía unir servomotores de tamaño estándar formando una estructura servo erector set, en la foto central de objetivos de LibreServo, DY-BOT v2, se puede ver un ejemplo claro de dichas piezas usadas por mi mismo hace casi una década. En esa época aún no había mercado chino al respecto con lo que Lynxmotion era casi la única vía... y bien cara que se pagaba la exclusividad. Además, Lynxmotion también era y es bien conocida por su placa SCC-32 actualizada recientemente, una placa simple pero eficaz para manejar hasta 32 servomotores mediante comandos por puerto serie.
Ejemplo de lynxmotion de un bípedo construido a partir de servomotores estándar y sus servo erector set

En agosto del 2012 Lynxmotion fue comprada por la empresa canadiense Robotshop. Robotshop es un gigante en la robótica que vende componentes para robots a nivel mundial.
Los años han pasado y Lynxmotion ha decidido adentrarse en el mercado de los smart-servo y sacar este mismo mayo (2019) una familia de servomotores, Lynxmotion Smart Servomotors (LSS).
Nuevos Smart Servo de Lynxmotion

Lynxmotion ha sacado tres modelos. Los tres comparten electrónica y mismo tamaño y diseño externo, pero se diferencian en el par y velocidad:
- El modelo ST1 (Standard) es de 14Kg/cm de par y 0.166seg/60º
- El modelo HS1 (High Speed) es de 8Kg/cm de par y 0.1seg/60º
- El modelo HT1 (High Torque) es de 29Kg/cm de par y 0.166seg/60º
Los dos primeros modelos, ST1 y HS1, salen a un precio de 72.21€ y el modelo de alto par, sale a un precio de 116.70€. Los precios de los modelos básicos son un poco caros, pero el modelo de alto par tiene un precio súper competitivo. Entiendo que al usar la misma electrónica para todos los modelos, eso ha hecho que el precio del más básico también sea un poco elevado.
Métrica de los tornillos en LSS
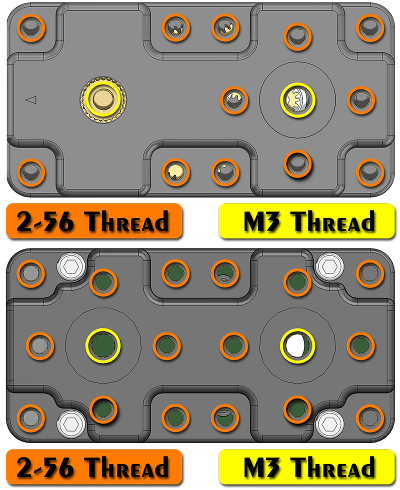
Siguiendo con las características de los servomotores, a primera vista, sin tener ninguno a mano y viendo sólo documentación de su web, parecen servomotores de buena construcción. El "cuerpo" de los dos primeros es totalmente de plástico, pero en el modelo de alto par, la sección central es de aluminio para mejorar la disipación de calor y mejora estructural como menciona Lynxmotions en los comentarios. En los tres modelos, el motor es DC, pero en los dos primeros es cored DC y en el de alto par es coreless DC moviendo engranajes de latón los dos primeros, no de plástico como nos tienen acostumbrados la competencia, y de acero inoxidable el tercero, siendo el peso final de 58 gramos para los dos modelos básicos y 80 gramos para el modelo más caro. Hubiera optado por poner coreless en los tres modelos ya que los modelos básicos no son precisamente baratos. Además, aunque es algo que Lynxmotion nos tiene acostumbrados, usar tornillería de métrica imperial en vez de métrica estándar/internacional me parece un desacierto absoluto y ganas de tocar las narices cuando podrían haber usado tornillos de métrica 2 (M2) perféctamente.
Por otro lado, todos los modelos incluyen encóder magnético de 12 bits, tienen sensor de corriente, voltaje y temperatura (de ahí que el modelo básico tenga un precio algo elevado). Me sorprendería mucho que el sensor de temperatura no fuera el propio interno al microprocesador. Por lo demás, no puedo hablar mucho más de los componentes ya que no está documentado qué modelo exacto de encóder o de sensor de corriente han usado. Seguramente hayan ido al estándar AS5045 como encóder. En cuanto a los sensores, en principio sin conocer más, no hay queja alguna, todos vienen muy bien equipados.
Además traen un bonito led RGB, que ilumina parte del frontal del servomotor. Desgraciadamente el led RGB se ha quedado en sólo "led de 7 colores" y sin posibilidad de cambiar su intensidad. Esto es debido a que simplemente han usado tres salidas digitales del microcontrolador y no se han molestado en programar un PWM, o usar salidas de PWM si tuvieran libres, para poder tener un led RGB real. Edito: Lynxmotion me comenta que en versiones posteriores del firmware introducirán la funcionalidad de RGB real.
El funcionamiento de los servomotores va desde los 6V hasta los 12.6V. Hubiera estado bien que pudieran funcionar a 5V pero siendo un servomotor de 12V realmente tampoco es tan importante y es un rago de operación más que adecuado. Edito: Lynxmotion me comenta que sí llegarían a funcionar a 5V.
La comunicación puede ser serie o PWM estándar de servomotor, lo cual está bastante bien. La comunicación serie no requiere de ningún hardware especial y pueden ser conectados directamente con un arduino o una Raspberry, por ejemplo, hasta una velocidad de 921600bps. Son servomotores que como es normal en este tipo de servomotores, se pueden instalar en cadena, conectar un servomotor directamente a otro servomotor, con el conector de conexión tipo molex en ambos lados del servomotor, lo cual me parece un acierto en vez de tenerlos ambos sólo abajo del servomotor como otros modelos. Curiosamente la comunicación serie es en claro, osea, que si vas a mandar la posición 124, en vez de mandar 124 en un byte, se manda 1, 2 y 4 en ascii, lo cual facilita el debug pero hace la comunicación muchísimo más lenta, sobre todo si tienes un gran número de servomotores.
Como controlador, Lynxmotion ha decidido optar por un microncontrolador de 32 bits Cortex M0. Dentro de la familia de ARM Cortex, la M0 es la más básica. Aún así, es más que suficiente para la tarea requerida. Se me hace extraño que con este microcontrolador el puerto serie sólo vaya a 921600bps como máximo, debería de poder ir a 4-6Mbps, pero sin saber el modelo exacto tampoco pondría la mano en el fuego.
En cuanto al conjunto de comandos que admite, personalmente me parece muy limitado, pero comparando con otras marcas, parece que es normal que aun siendo smartservo, sean tan poco smart. Tiene algún comando para configurar la aceleración y desaceleración así como en cierto modo configurar el par motor. El resto de comandos es lo básico de ir a X posición en Y tiempo y pedir al servo la temperatura, voltaje, corriente...
El Servomotor no lleva ni un mes en el mercado, así que algunas cosas puede que cambien en el futuro (debido a algún upgrade de firmware por ejemplo).
Intentaré estar al tanto. Más información en: wiki de LSS.