Análisis del sensor de corriente ZXCT1010
 Circuito básico ZXCT1010 con protección Zener
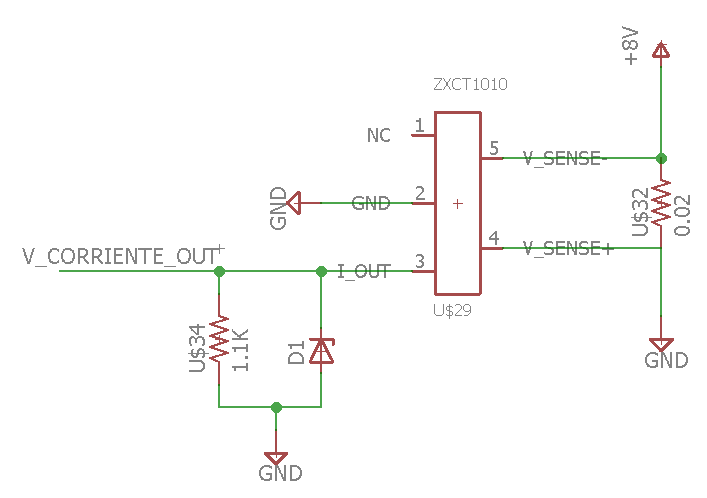
Circuito básico ZXCT1010 con protección Zener
El primer componente que voy a analizar en mi nueva placa para testear LibreServo es el sensor de corriente ZXCT1010, el cual es una versión mejorada del sensor ZXCT1009. La mejora sobre todo es en la parte baja del sensor, cuando hay poca caída en Rsense, parte en la que quería estar ya que no quiero que se desperdicie tensión en Rsense. Además, aparejado al sensor de corriente está el diodo Zener MMSZ5226BS para evitar que la tensión de salida del sensor de corriente pueda superar los 3,3V y quemar el microcontrolador.