¡Primer pedido de LibreServo!
!Acabo de realizar el primer pedido de PCBs! Además, he realizado también el pedido de los componentes.
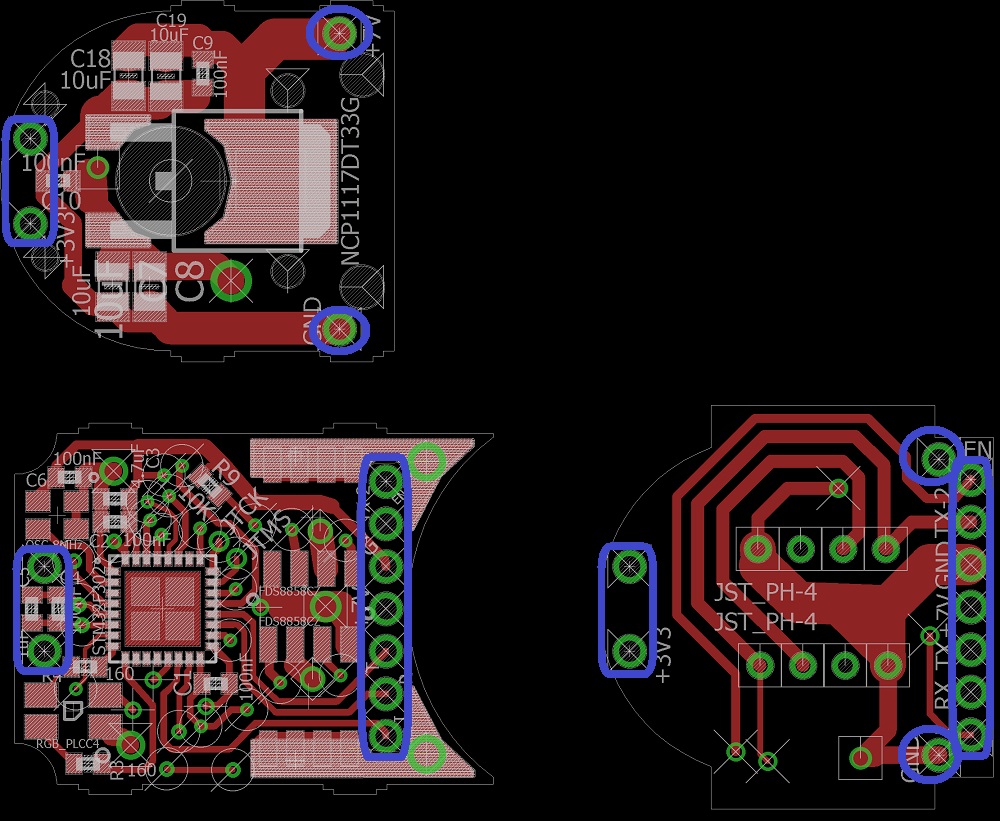
El pedido de PCBs lo he realizado a China (en este aspecto, su calidad/precio es incontestable). Generalmente suelo hacer los pedidos a seedstudio, pero la verdad es que siempre me suele generar problemas y sobre-cargos. O mis placas son "demasiado complicadas" o cualquier otro tipo de excusa vale. Investigando, esta vez opté por JLCPCB. Tienen una oferta muy llamativa de 10 placas a 2€ para tu primer pedido, y luego a 5€(ambos precios son extraordinariamente bajos). Además, la página web tiene alguna utilidad interesante, como que tenga un visor de los ficheros gerber files que has añadido al pedido.