LibreServo v2.3.1. Versión Lanzamiento
 Versión Final LibreServo v2.3.1
Versión Final LibreServo v2.3.1
¡Finalmente LibreServo ha llegado a la primera versión final del Hardware (versión 2.3.1)!

Ha sido un largo camino y aún queda mucho camino por recorrer, pero ahora en la parte software. El proyecto LibreServo tampoco parará en el software y más adelante vendrán nuevos proyectos que hagan uso de LibreServo, como un posible robot bípedo en 3D, pero todo ello llegará en el futuro y todo ello lo anunciaré aquí. Pero dejemos de elucubrar y hablemos del ahora.
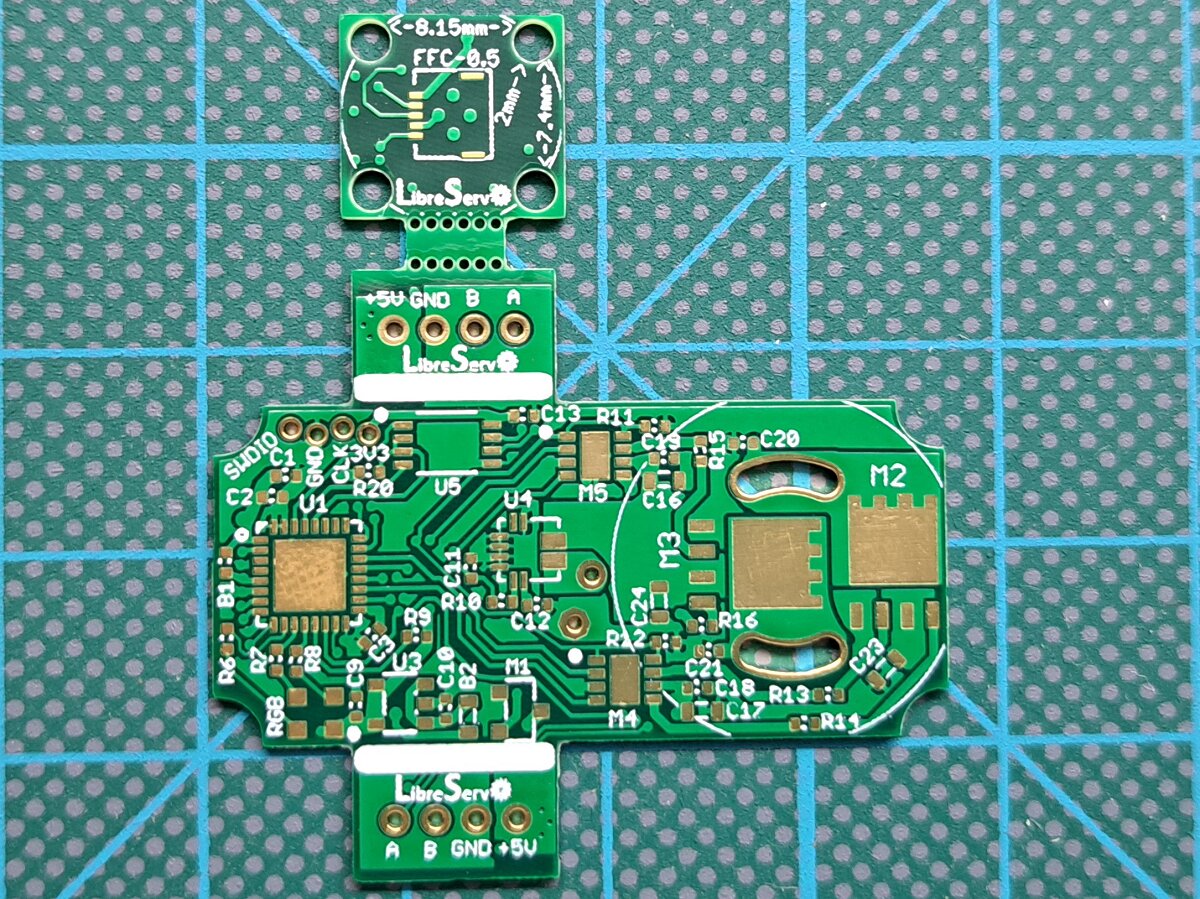
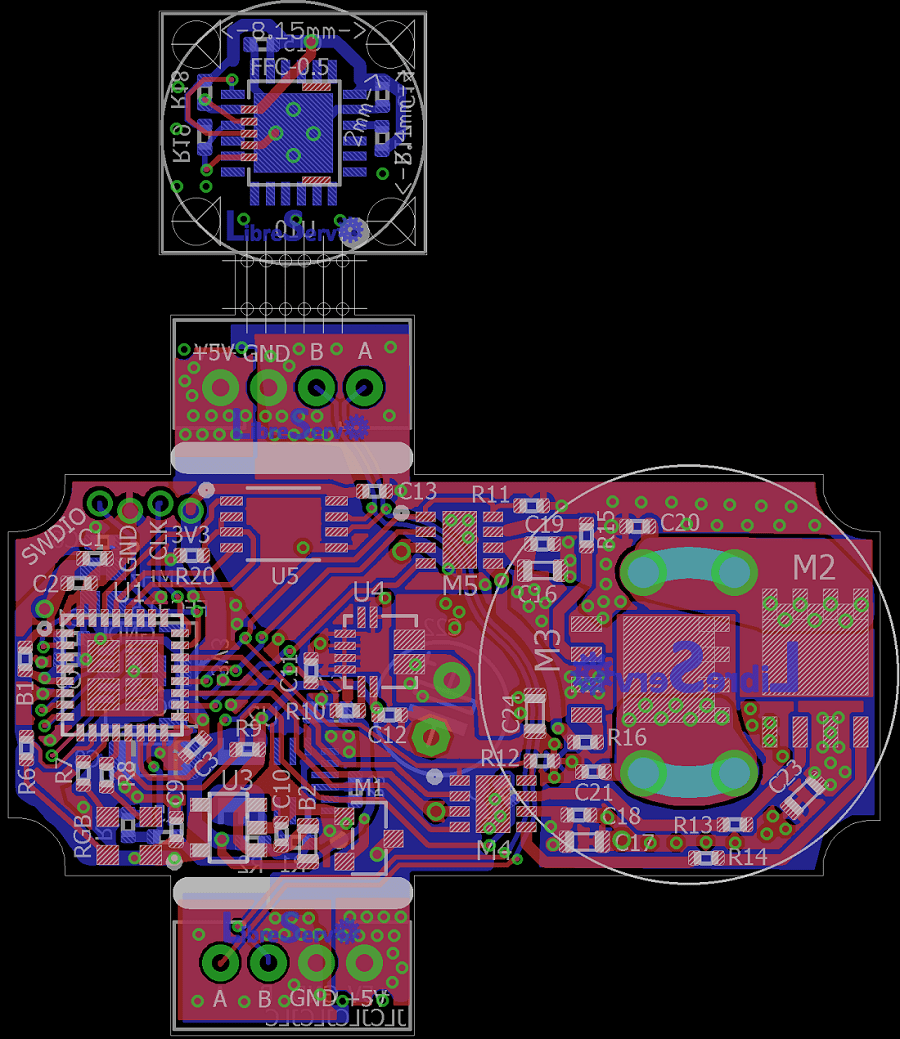 LibreServo v2.3 PCB
LibreServo v2.3 PCB
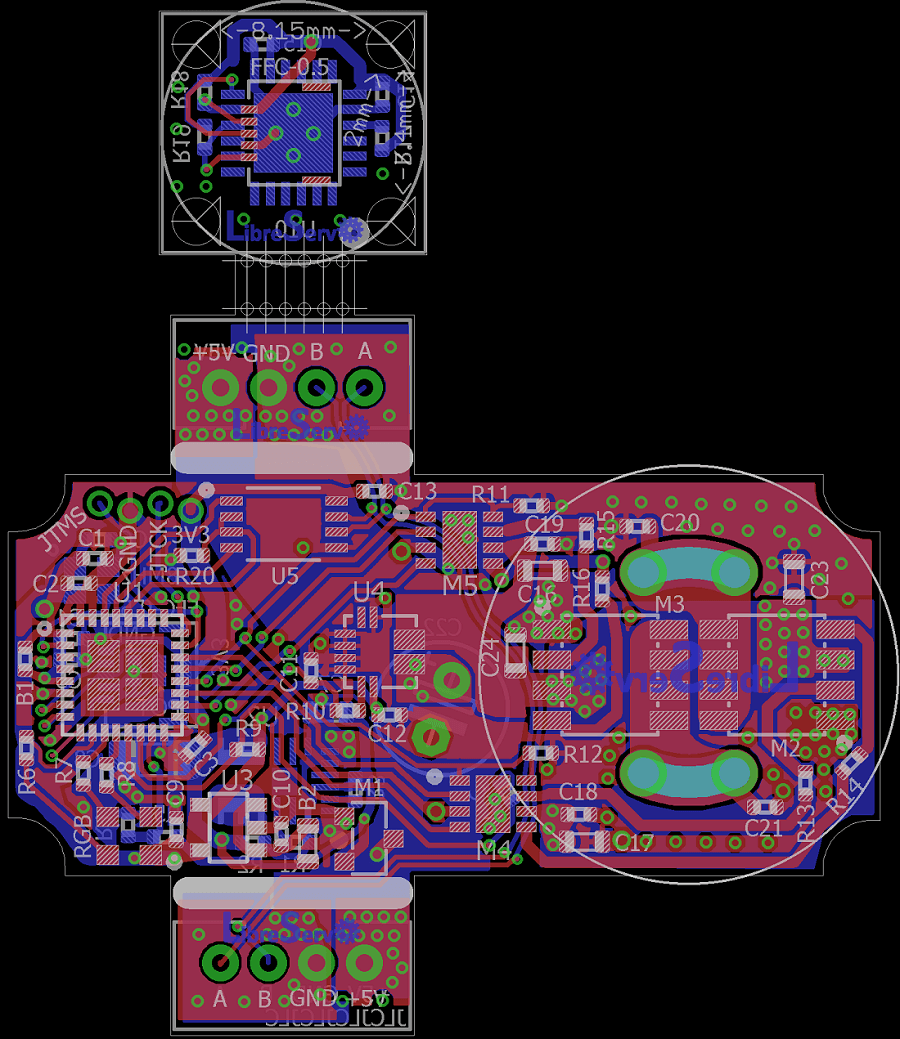 LibreServo v2.2 PCB
LibreServo v2.2 PCB
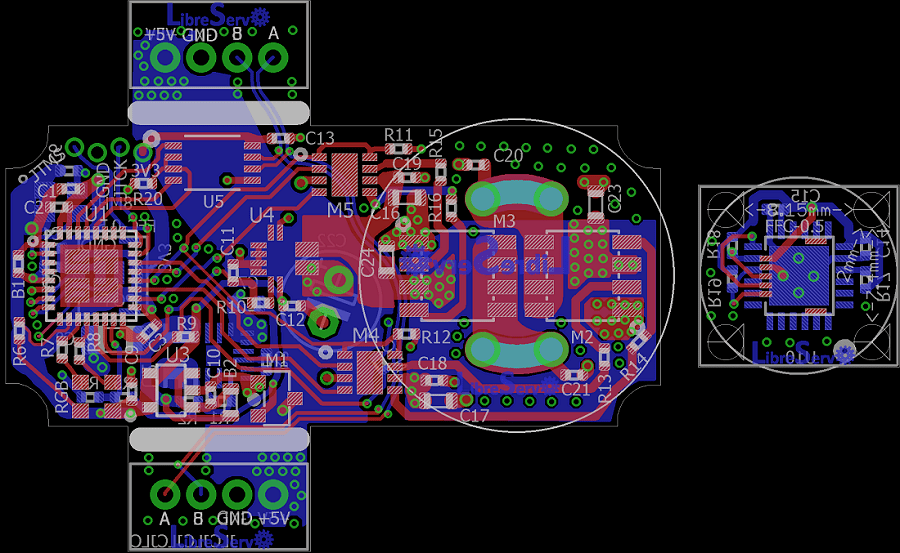 PCB de LibreServo v2.1
PCB de LibreServo v2.1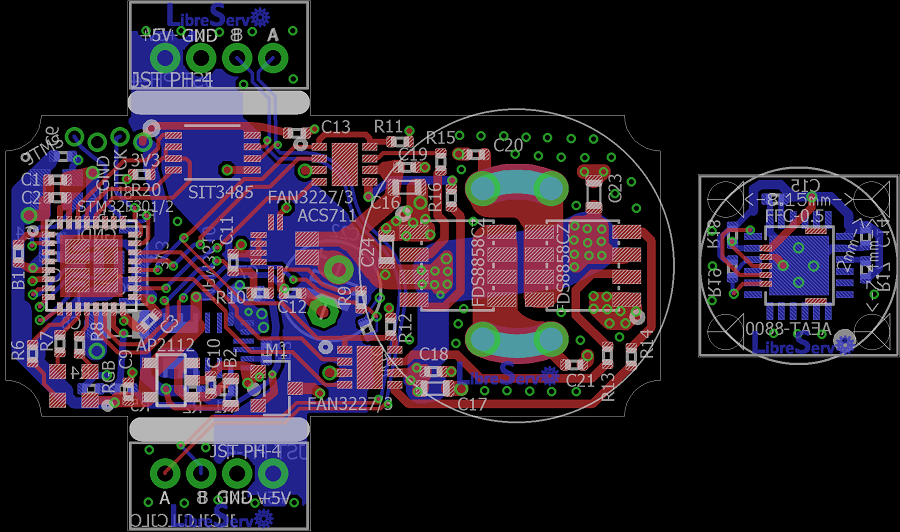 PCB de LibreServo v2
PCB de LibreServo v2
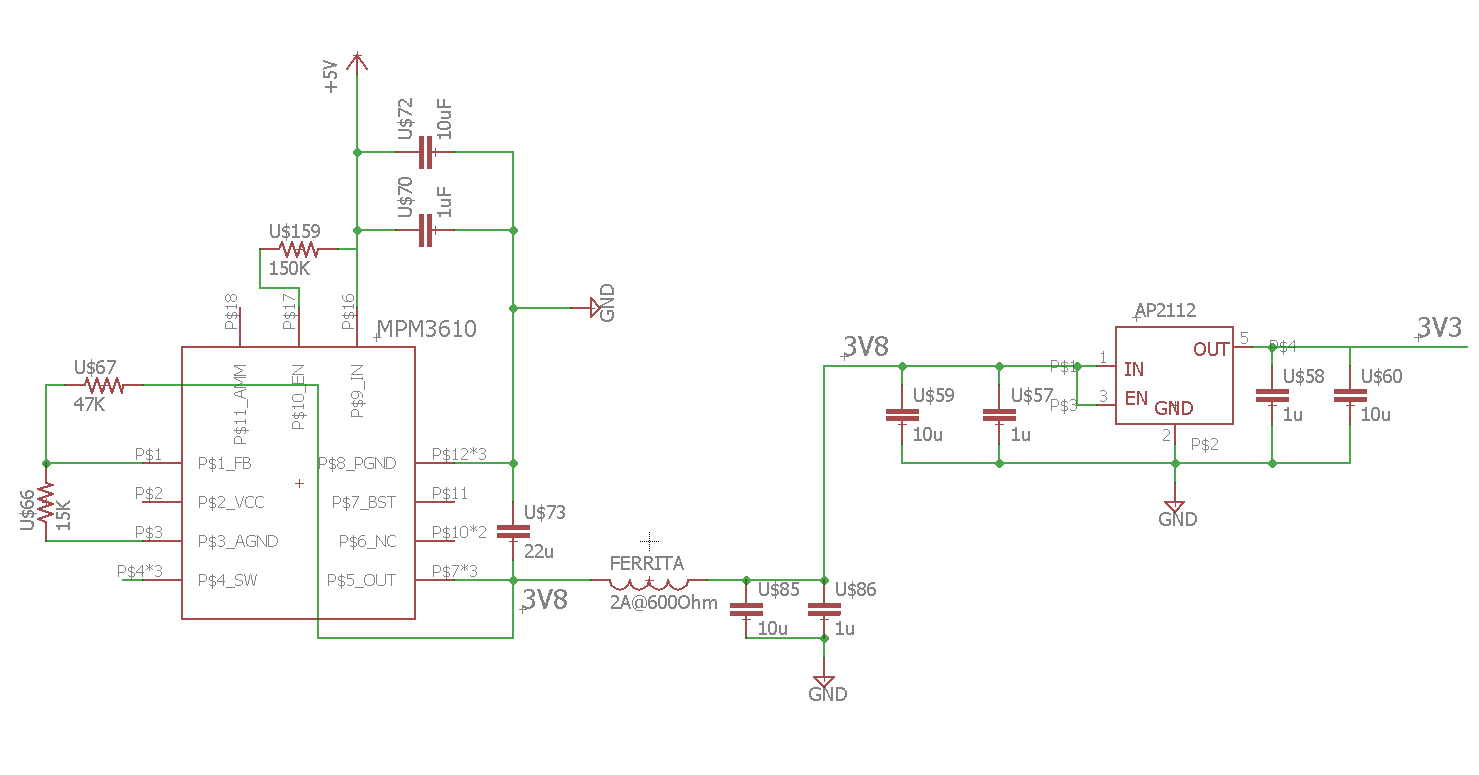 Circuito MPM3610 y AP2112
Circuito MPM3610 y AP2112