Esquemas LibreServo v2
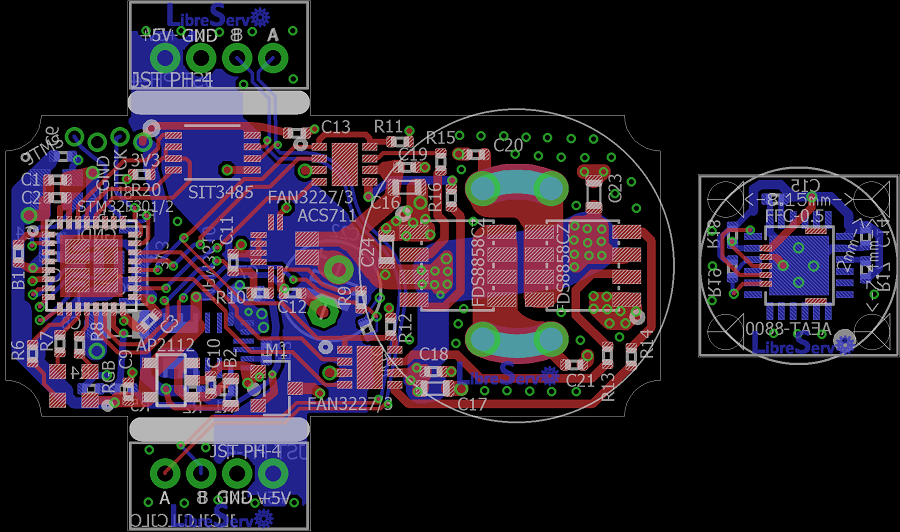 PCB de LibreServo v2
PCB de LibreServo v2
Tenía pendiente desde hace meses subir los esquemas a la web. Los esquemas son exactamente los mismos con los que fabriqué las PCB de LibreServo v2 pero con los textos corregidos en posición para que se vean mejor.
En entradas anteriores como puedes leer en el artículo de la primera placa de test de LibreServo y en las conclusiones de la segunda placa de test de LibreServo, los cambios de LibreServo fueron masivos en todos y cada uno de los aspectos. Prácticamente todos los componentes fueron revisados y se pasó a un diseño de dos PCB de cuatro capas.
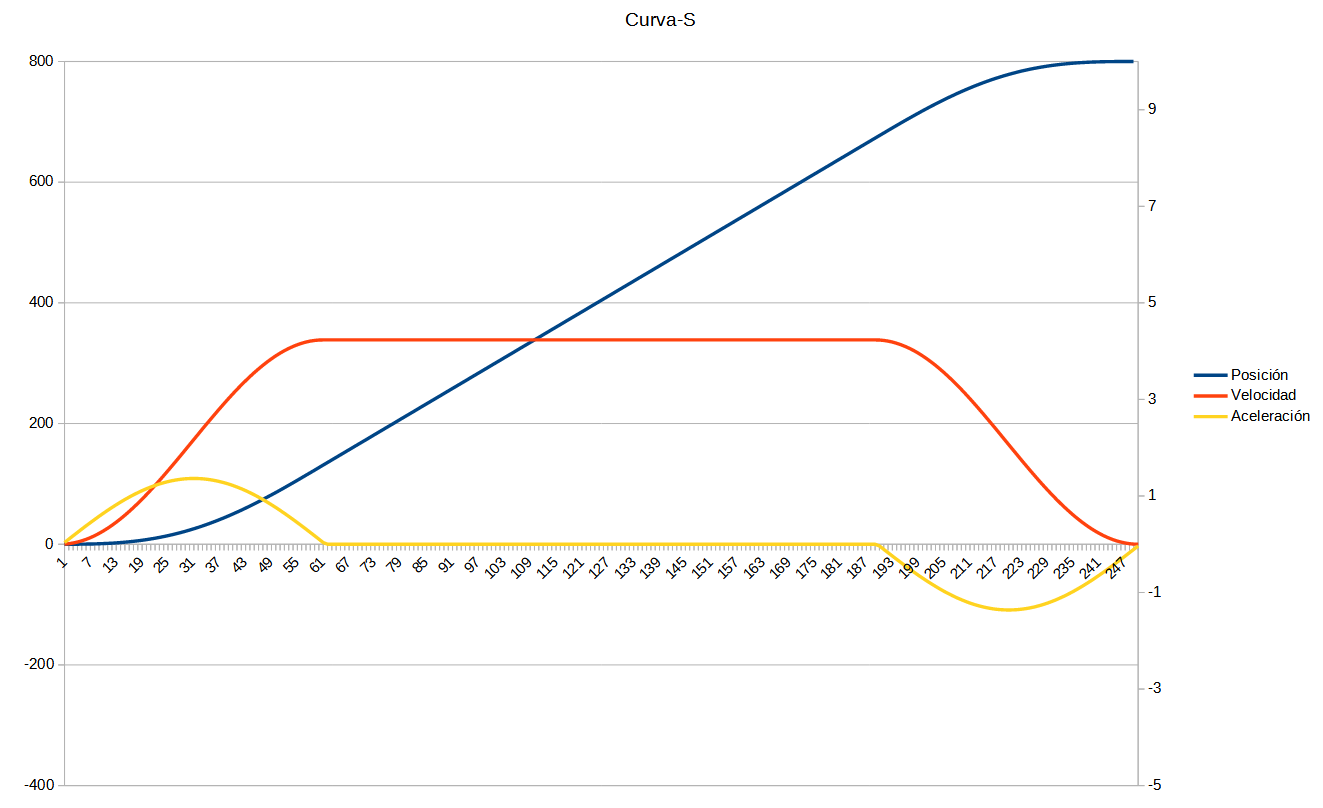 Gráfica de curva en S. Posición, aceleración y velocidad
Gráfica de curva en S. Posición, aceleración y velocidad
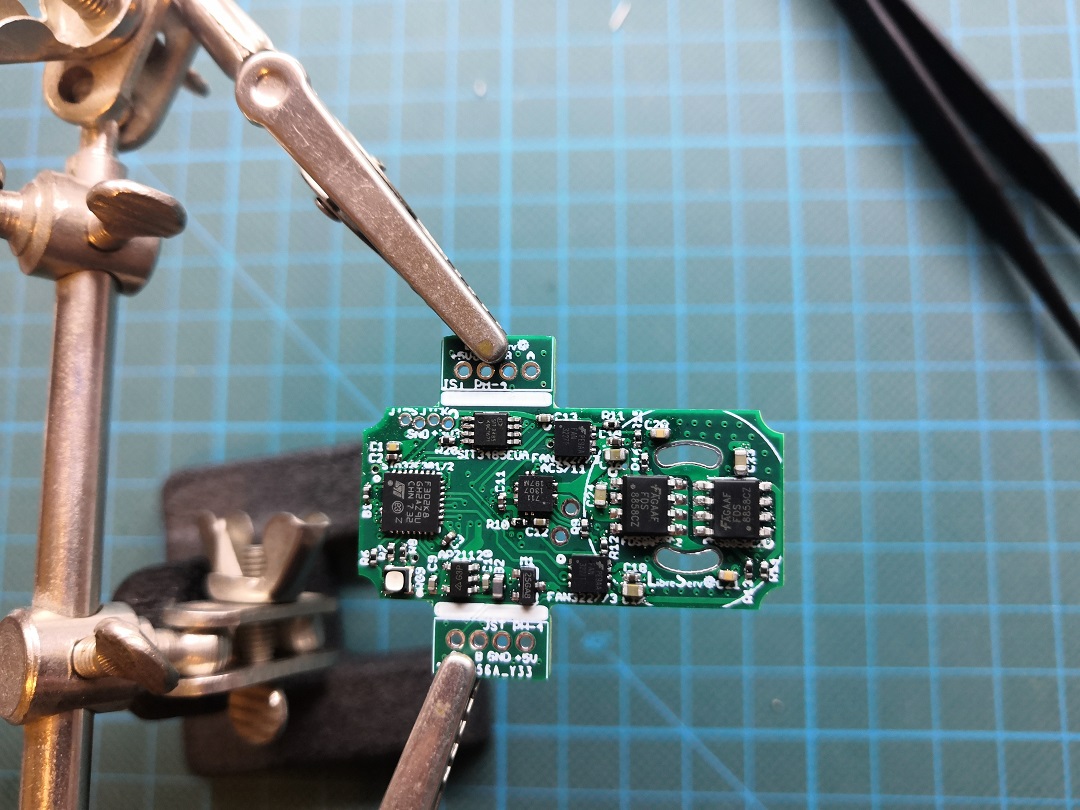 Soldando la primera LibreServo v2
Soldando la primera LibreServo v2