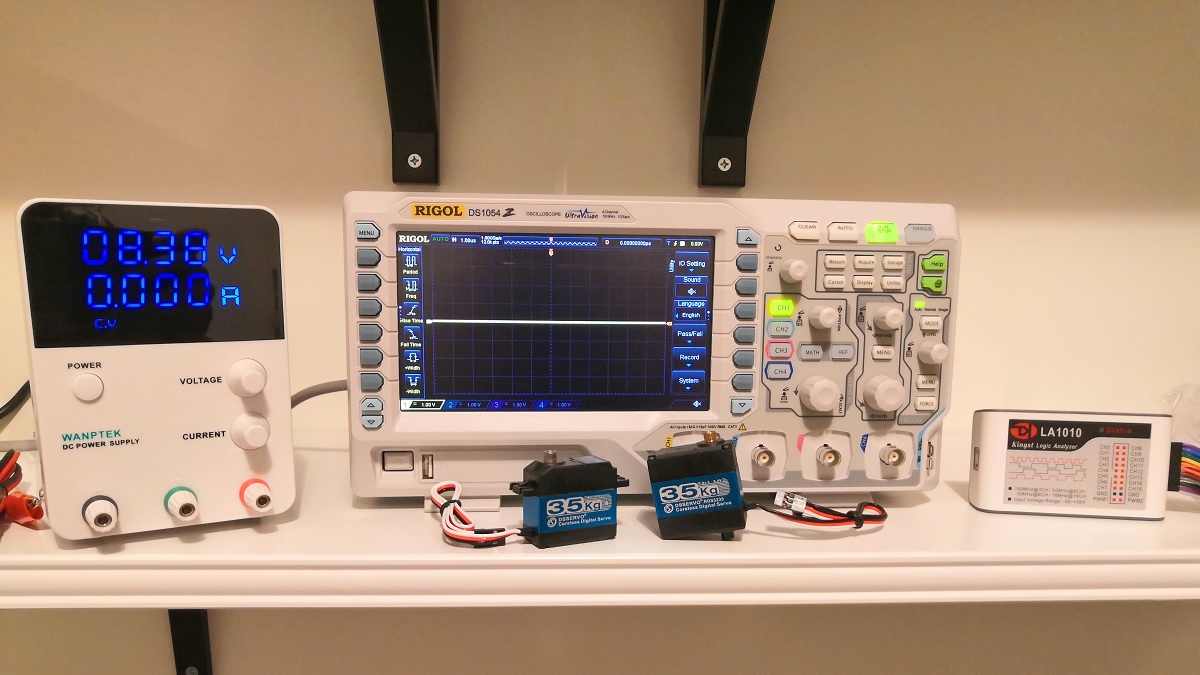
Tenemos un ganador. Resultados de las pruebas en PCB test 2
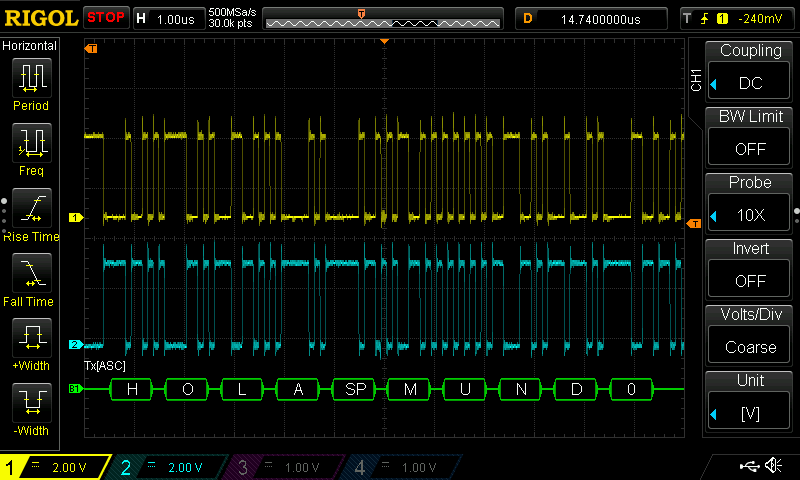
LibreServo enviando datos por RS485 a Arduino
Tras varias pruebas y análisis, el hardware de LibreServo ya está finalmente elegido y funcionando, ¡incluso el puente en H que me daba muchos problemas! En general todas las partes de LibreServo se quedan como estaban, porque ya funcionaban correctamente, salvo lo comentado en este artículo.
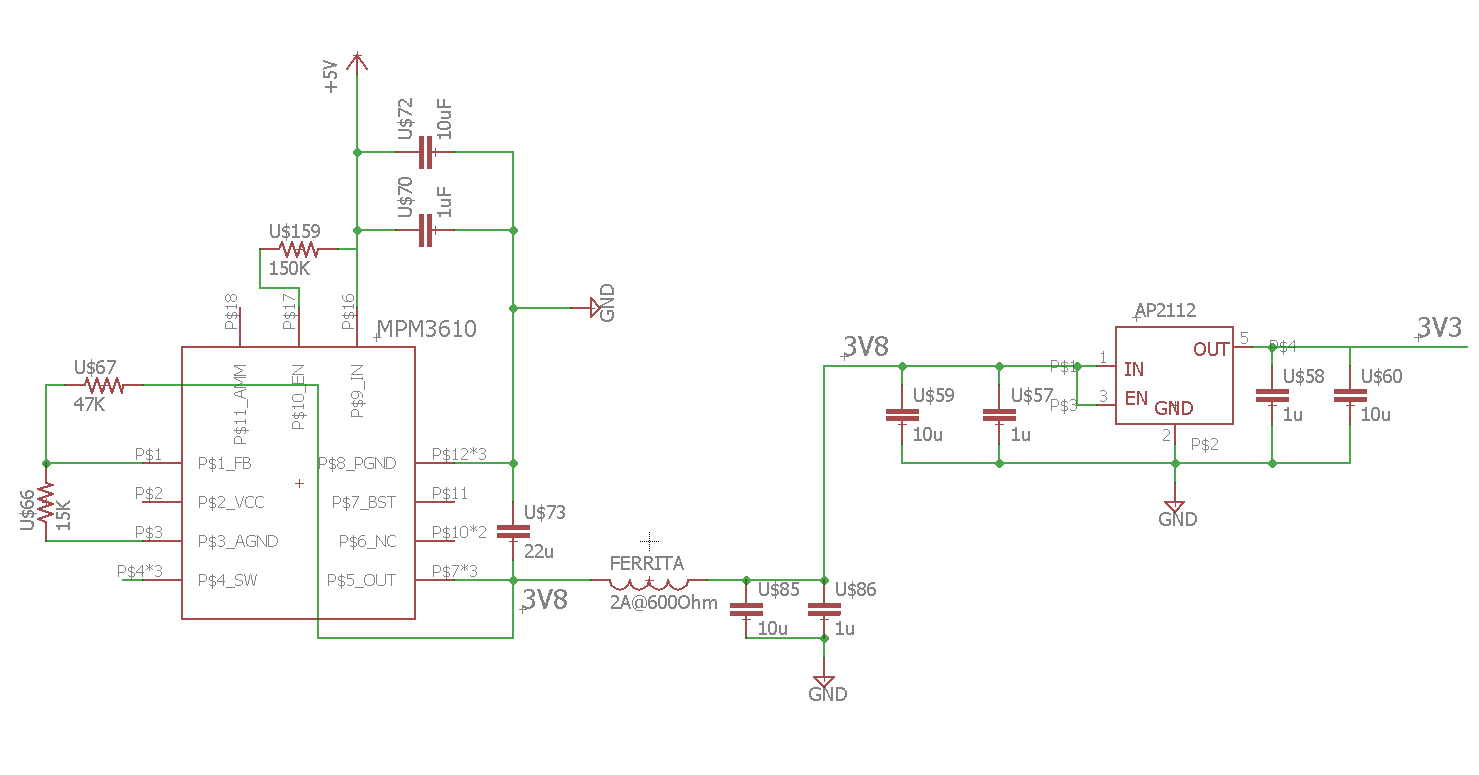 Circuito MPM3610 y AP2112
Circuito MPM3610 y AP2112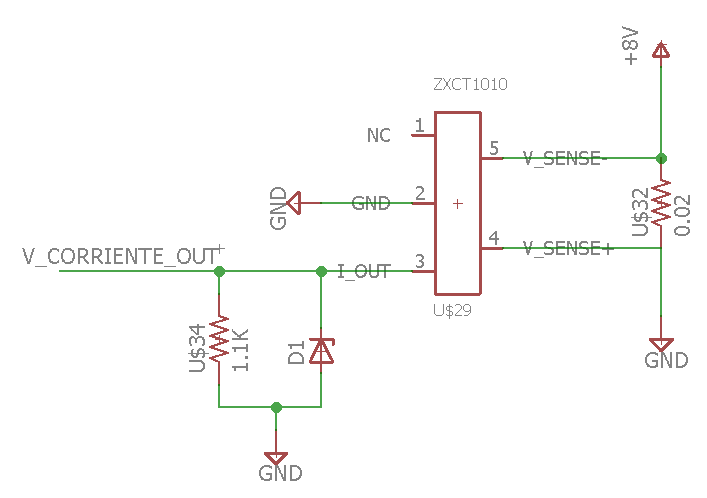 Circuito básico ZXCT1010 con protección Zener
Circuito básico ZXCT1010 con protección Zener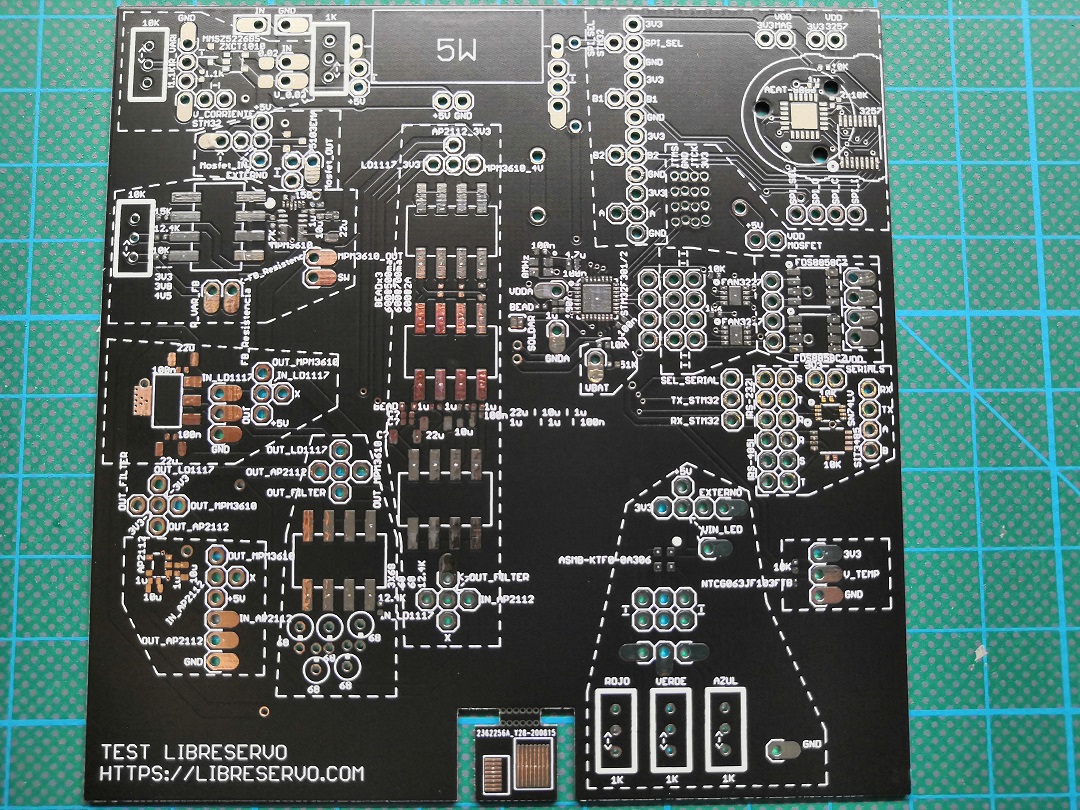 Placa para Tests de LibreServo
Placa para Tests de LibreServo
 Nuevo material y herramientas para LibreServo
Nuevo material y herramientas para LibreServo
 LibreServo pasa a ser
LibreServo pasa a ser 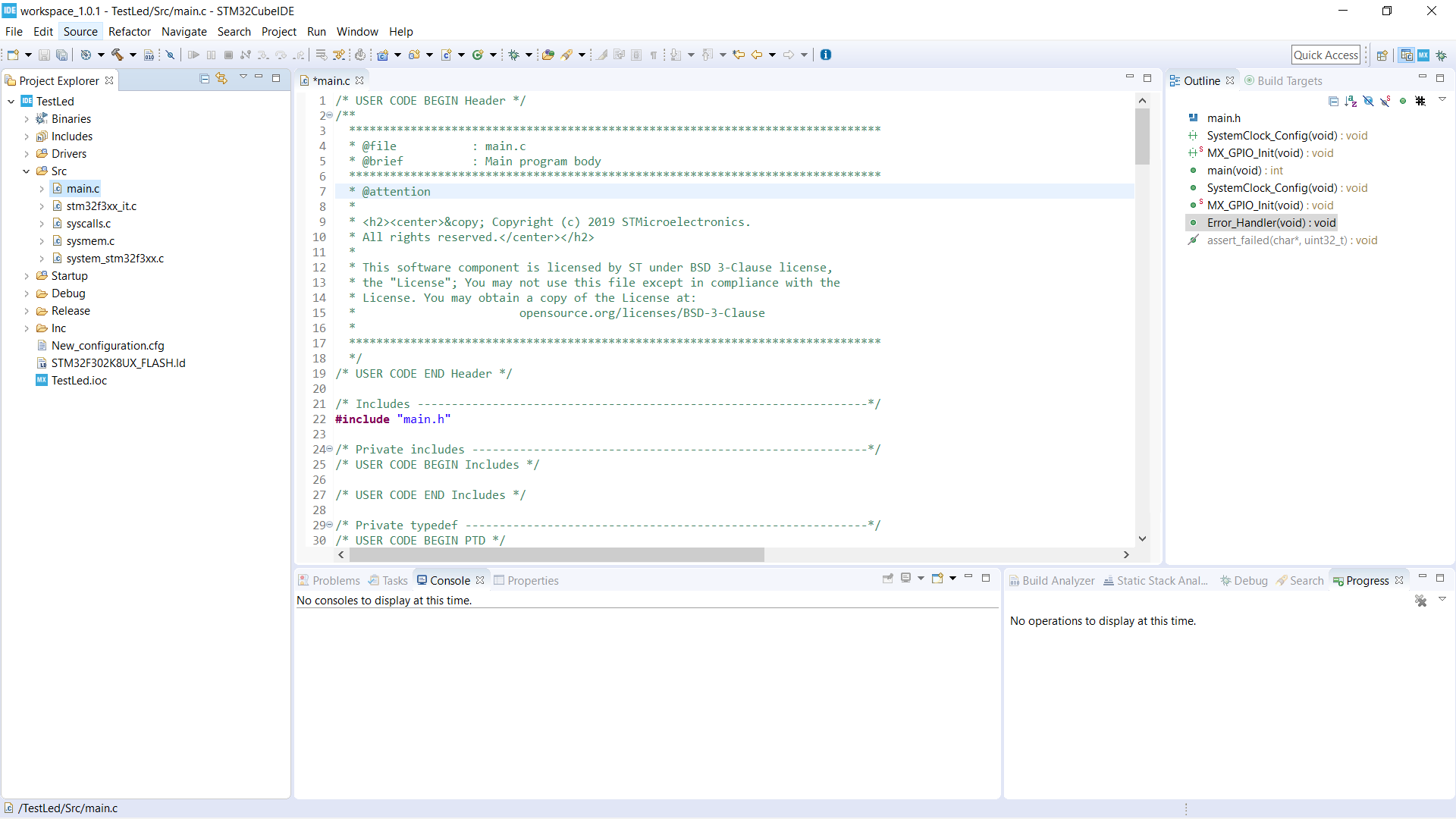 Código base recién creado
Código base recién creado