Cómo ajustar correctamente un PID
En Internet hay cientos de guías de cómo ajustar un PID y todos se pueden resumir en los siguientes sencillos pasos:
- Poner a cero KD y KI e incrementar KP hasta que el sistema corrija el error y empiece a oscilar. Ese sería el máximo de KP
- Incrementar KD hasta que la oscilación de KP se detenga
- Incrementar KI levemente para que el sistema corrija totalmente el error
Parecen tres pasos sencillos y rápidos, pero la realidad es que al final se convierte en una suerte de intentar adivinar las constantes y tras cientos de pruebas y horas, si tienes suerte, consigues un PID relativamente estable. Es una tarea bastante engorrosa que pocas veces consigue llegar a un resultado totalmente satisfactorio.
Olvidémonos de todo ello e intentemos obtener KP y KD de forma matemática.
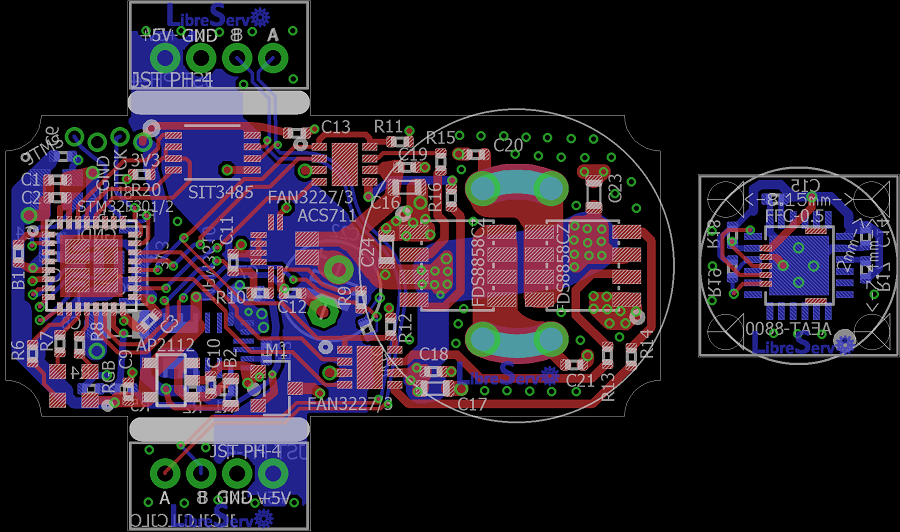 PCB de LibreServo v2
PCB de LibreServo v2
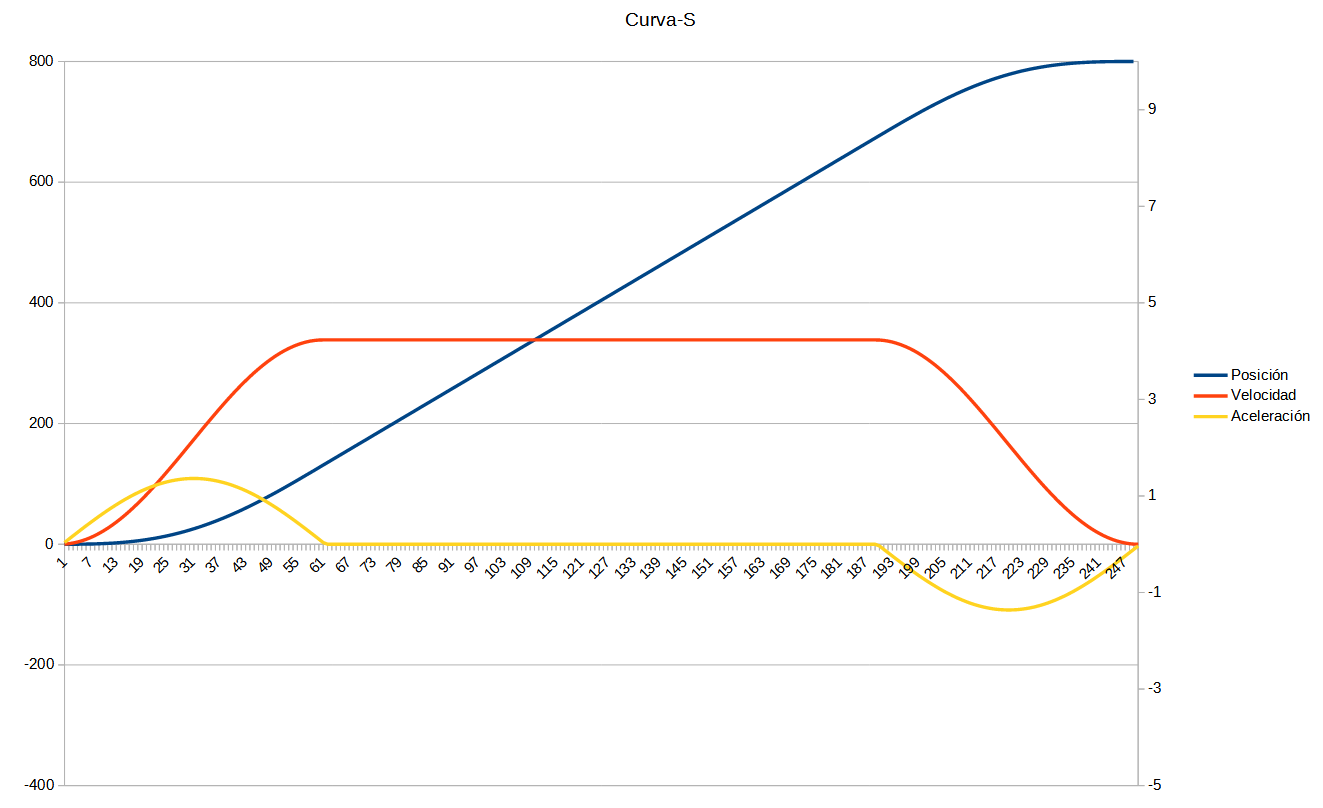 Gráfica de curva en S. Posición, aceleración y velocidad
Gráfica de curva en S. Posición, aceleración y velocidad
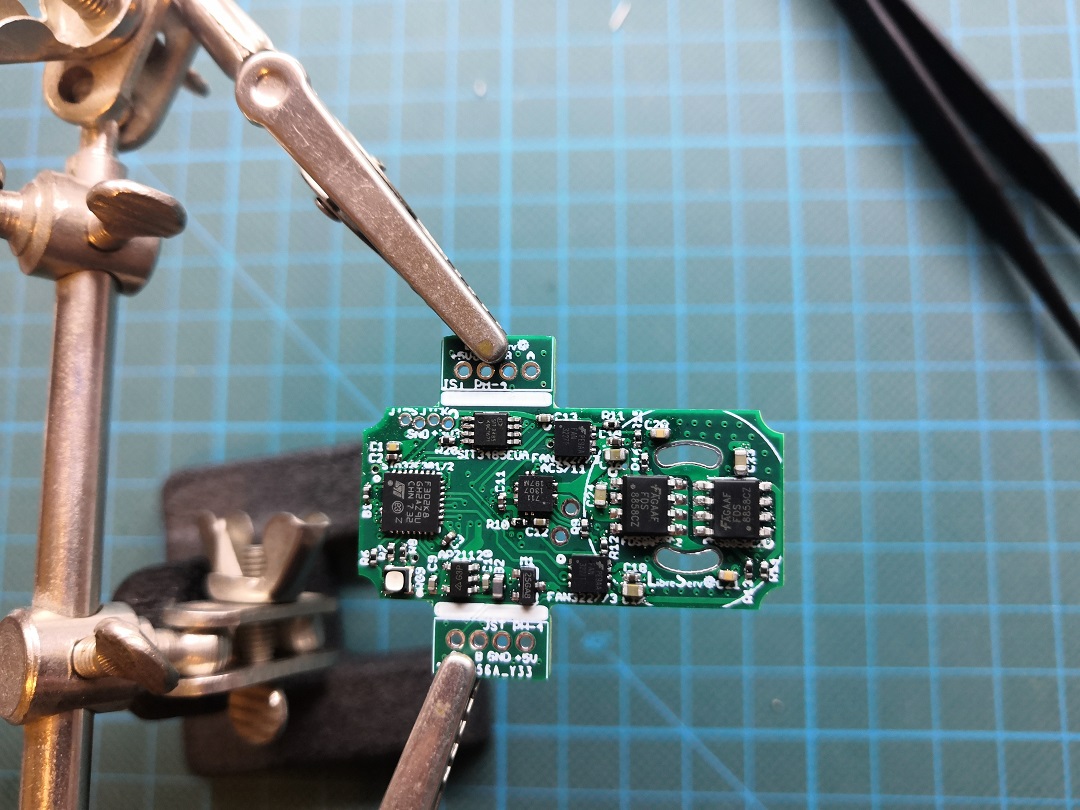 Soldando la primera LibreServo v2
Soldando la primera LibreServo v2