Manual primer proyecto STM32. Parte 2: Software

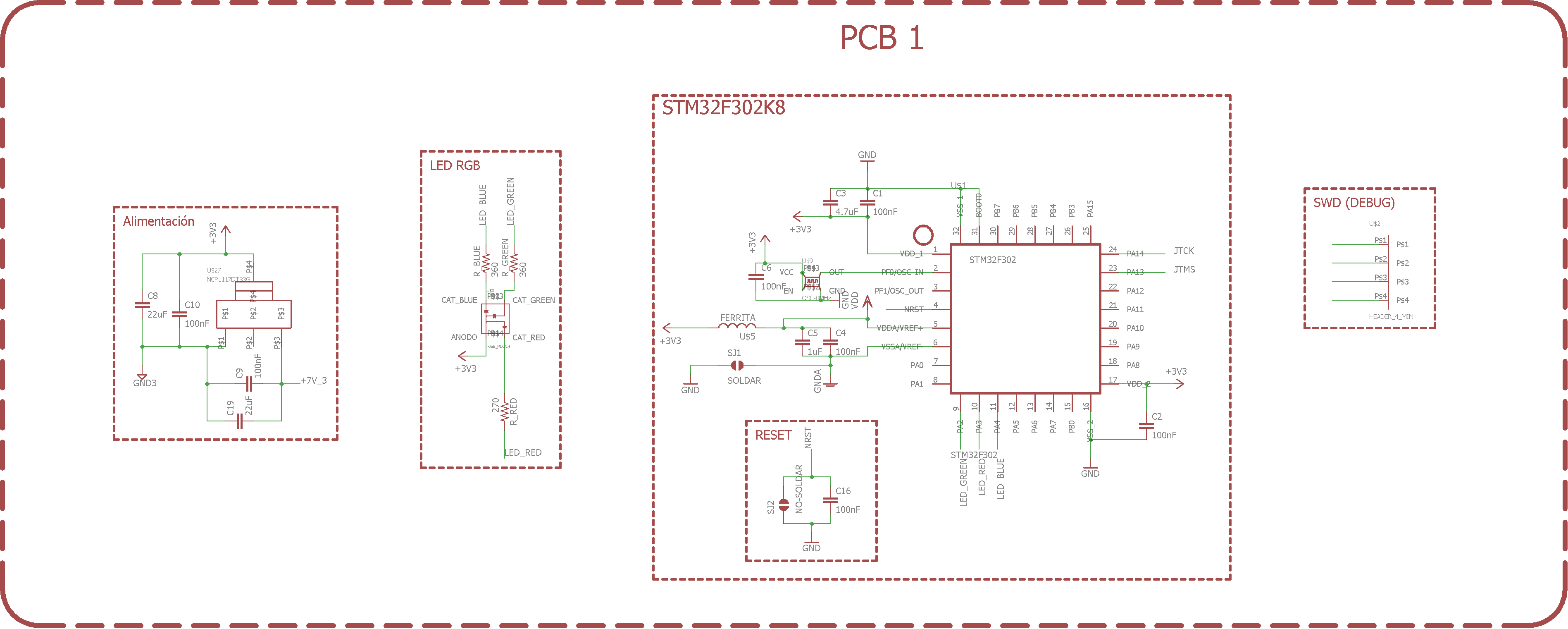
En esta segunda parte, veremos el software que usaremos para un primer proyecto con microcontroladores STM32. En este punto, suponemos que ya tenemos una placa comprada o la hemos diseñado según hemos visto en diseño de un circuito electrónico con STM32.
Como comenté en la entrada Software para programar STM32, en diciembre del 2017 ST compró el IDE de programación Atollic TrueStudio que estaba basado en Eclipse y lo hizo gratuito para todos los usuarios. Ya desde ese primer momento, toda la comunidad sospechaba que ST volvería a hacer otro movimiento en su ecosistema de programación. Y así ha sido, el 2 de mayo de 2019 no habiendo pasado ni año y medio desde la compra de Atollic, ST anuncia la descontinuación del IDE de Atollic y la creación de un nuevo programa, el STM32CubeIDE. Dicho softare es la unificación de su ecosistema de programación donde se integra CubeMX, que es un generador de código base, con Atollic. A día de hoy, usar CubeIDE es como usar CubeMX y Atollic por separado pero bajo una misma interfaz. Aún así CubeIDE aún está bastante verde, pero como va a ser el camino a seguir y todo lo que se muestre es copia exacta de lo que se haría en CubeMX y Atollic, voy a hacer la documentación basándome en CubeIDE.
¿Qué es un IDE de programación?
Un IDE de programación no es más que un entorno de programación donde se ha unificado un editor de código, un compilador y un depurador (debug) todo ello bajo una misma interfaz gráfica.