Progress of LibreServo
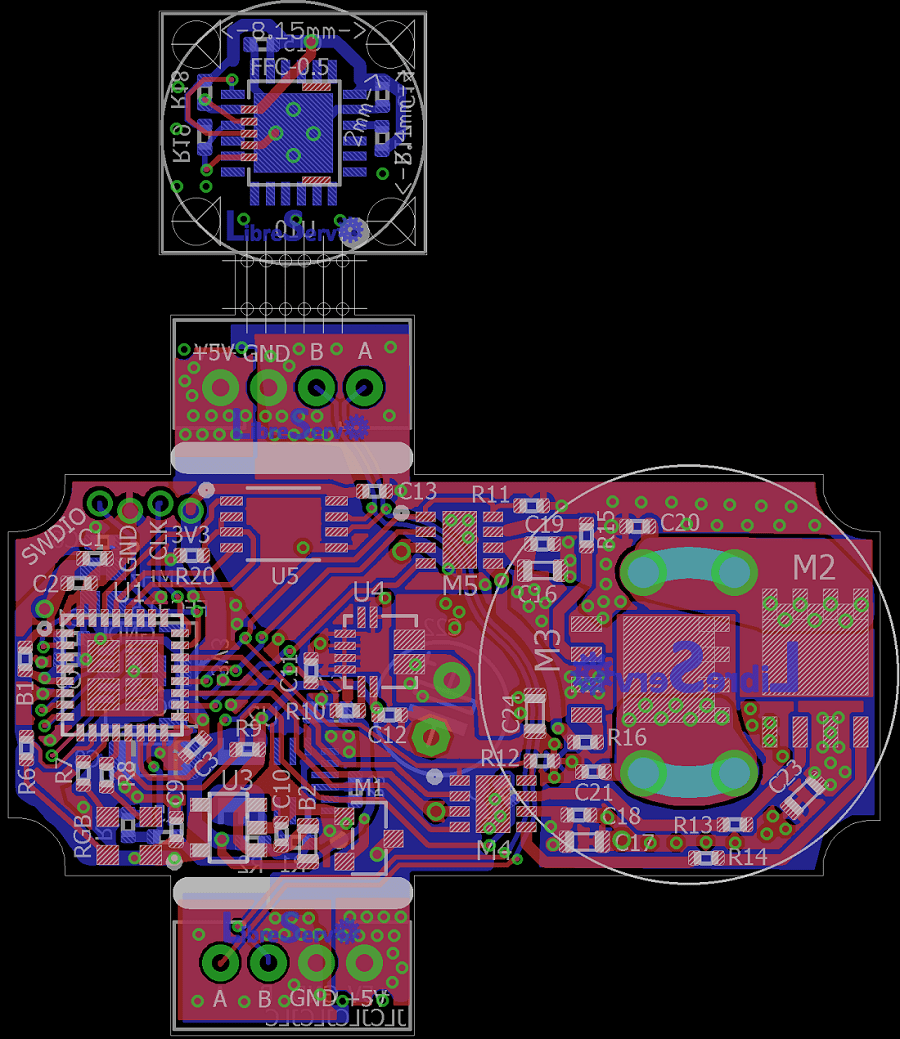
 Ficheros de producción
Ficheros de producción
After more than a year without any update in LibreServo, it might seem that the project is at a standstill and/or abandoned. As I have said more than once, and I repeat myself, I will never leave LibreServo until it is completely finished, even if it takes me 5 more years.
What has happened in the last year?
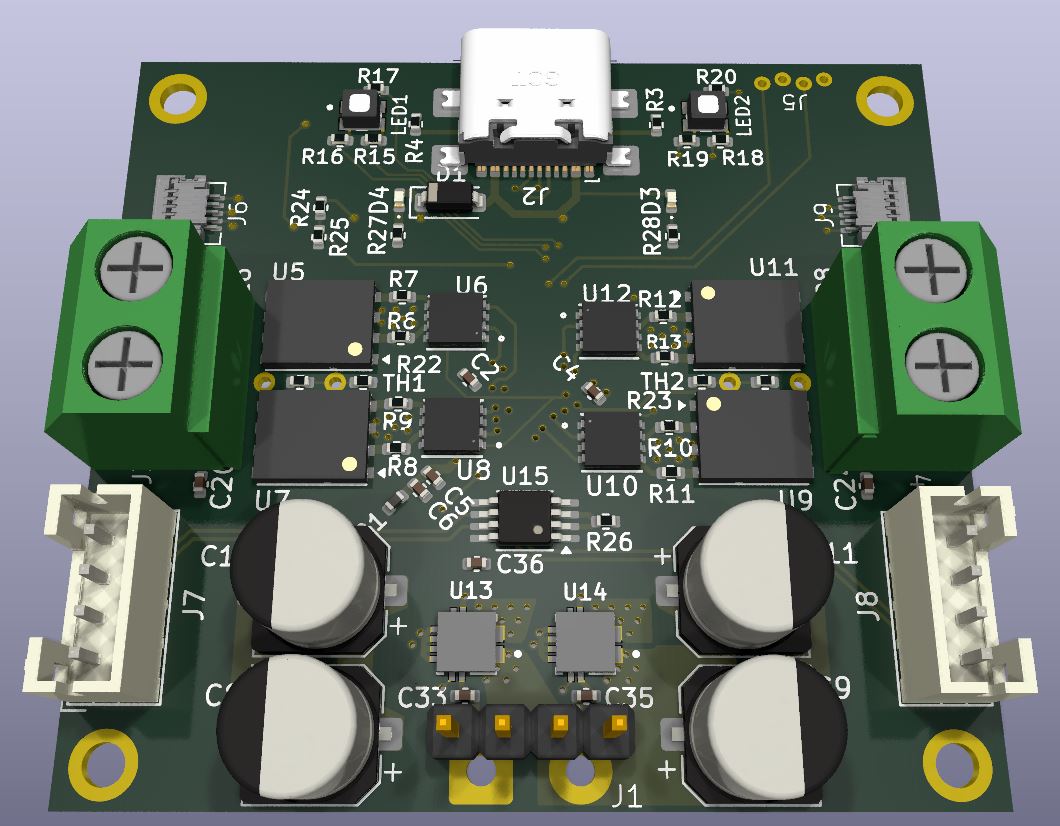
 LibreServo v2.3.1. Release Version
LibreServo v2.3.1. Release Version

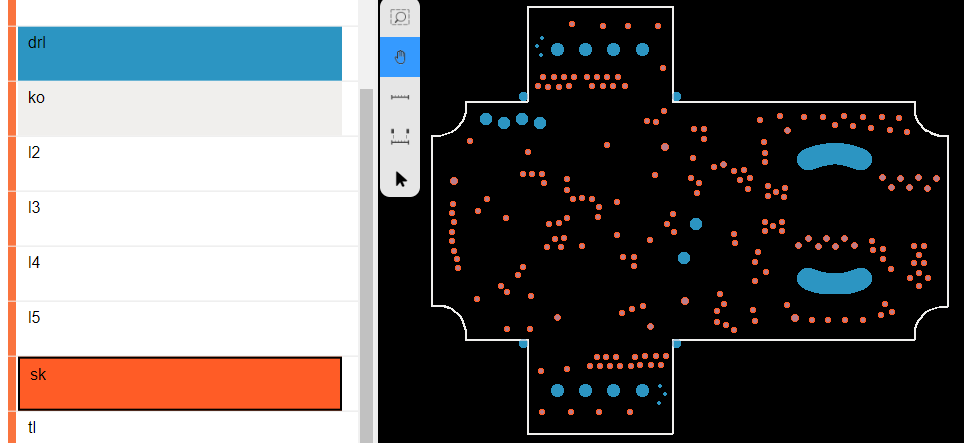 Production Files
Production Files
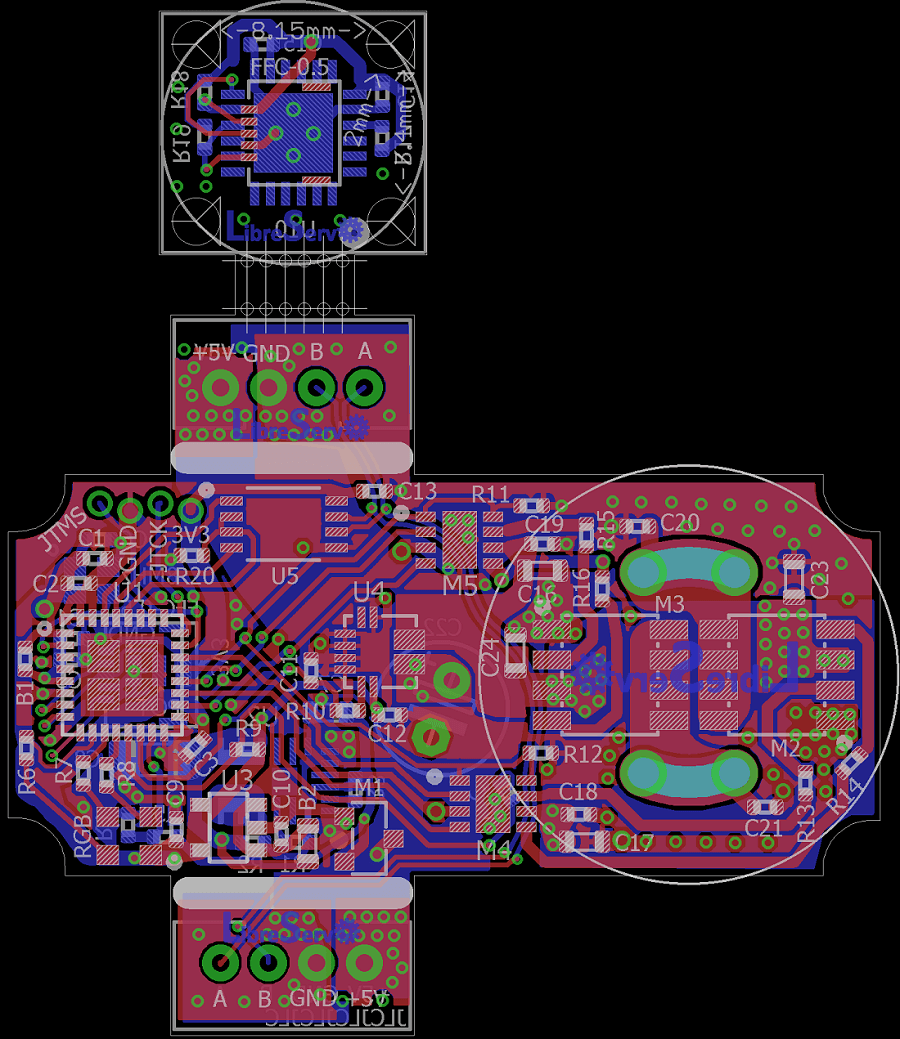
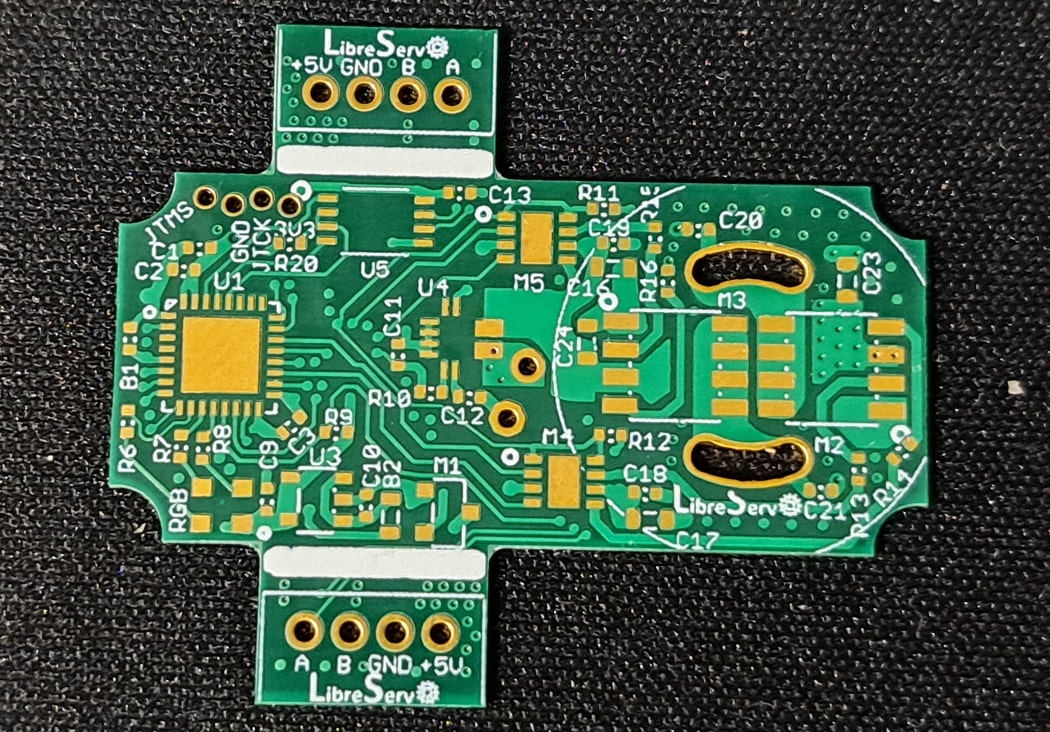
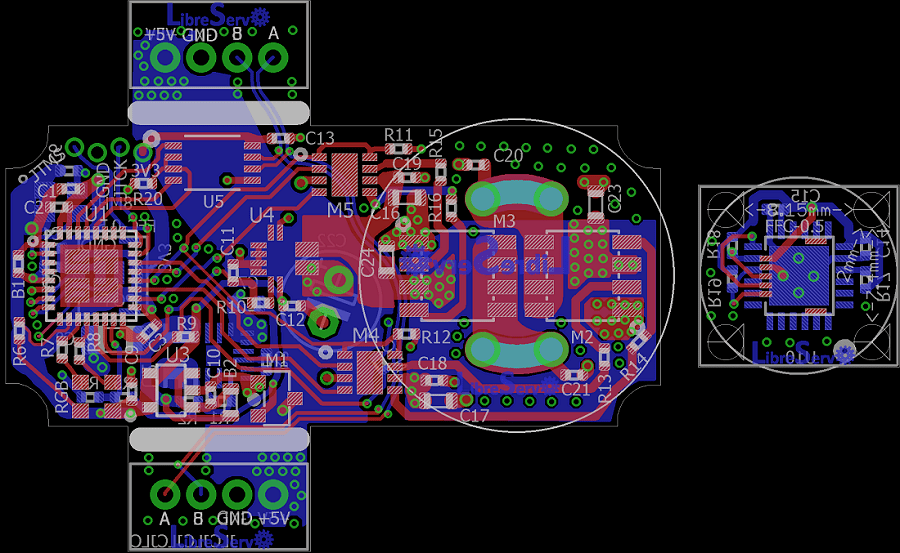
 LibreServo v2.3 PCB
LibreServo v2.3 PCB

 LibreServo v2.2 PCB
LibreServo v2.2 PCB
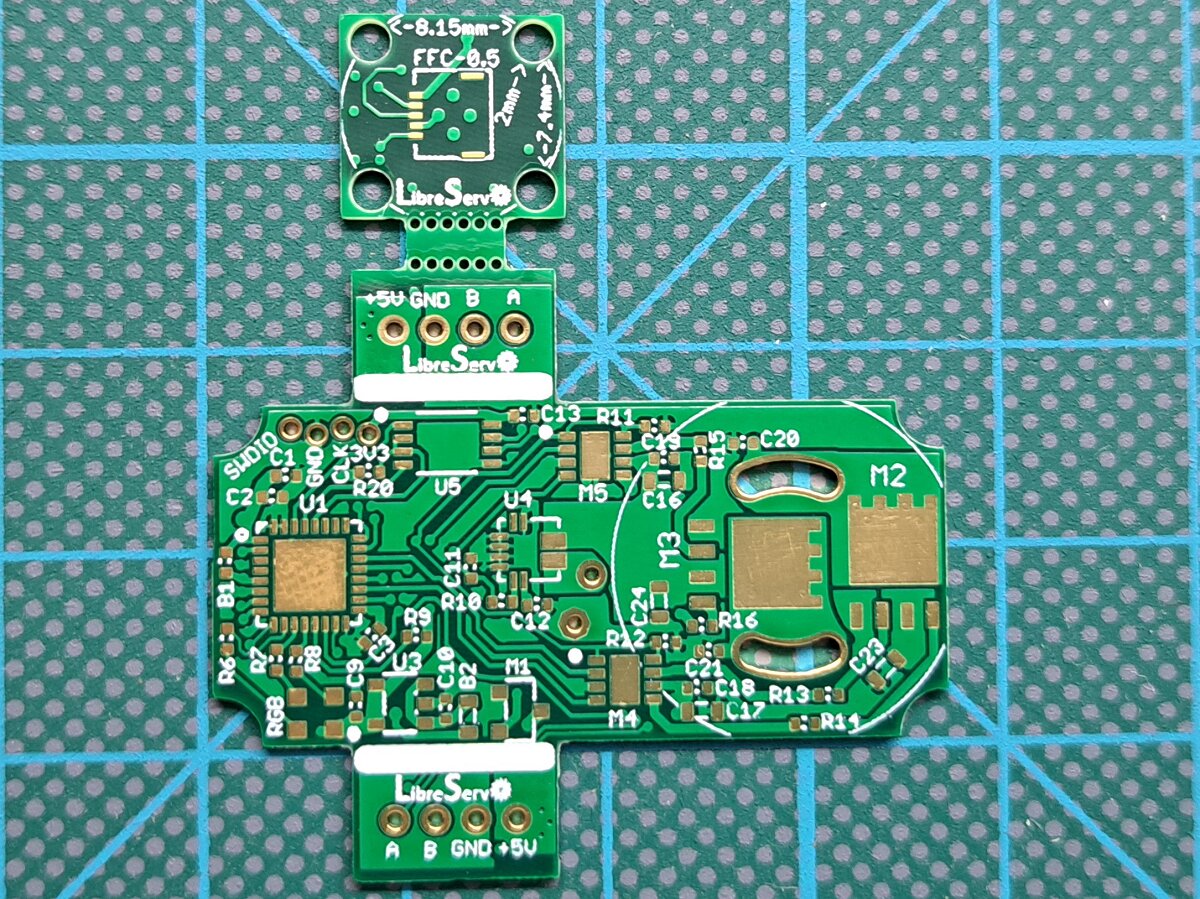
 New LibreServo v2.1
New LibreServo v2.1
 LibreServo v2.1 PCB
LibreServo v2.1 PCB